作者:MIKE BARNES
随着现代汽车安全技术的进步,我们看到诸如全景环视等先进驾驶辅助(ADAS)技术成为现代汽车的新标准。本演示展示了如何通过精确的实时反射和AI来检测障碍,以提升全景环视系统的性能,让汽车驾驶更安全。尤其是,当全景环视系统内嵌Imagination全新的XS GPU系列产品安全机制后,你可以清楚地看到为什么XS GPU系列是让汽车驾驶最安全的技术。
首先,让我们从图形显示说起。当你看到现有的全景环视系统时,你是否会想说“为什么车内屏幕显示的画面像PS1游戏画面?比如扁平的汽车显示、暗淡的阴影。为什么画面不能更明亮、汽车看起来更酷、更真实,为什么我无法看到周围环境?”

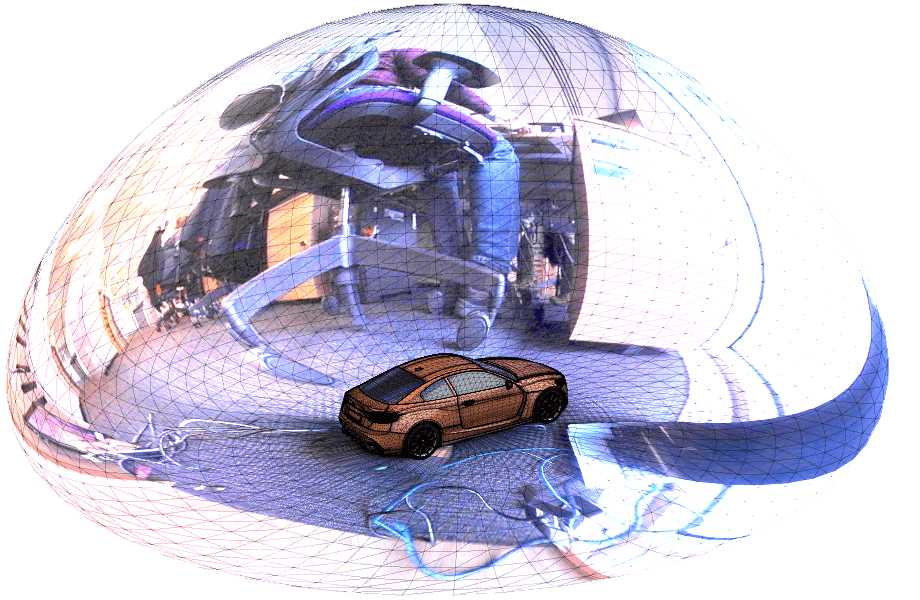
放心,我们已经设计了一个创新性的解决方案,提高了视觉质量以及汽车自动驾驶应用的精确性。下面是我们的智能全景环视系统演示的屏幕截图,展示了光照和周围环境光映射到汽车上的实时反射,而这些功能在当前市场上已有的全景环视应用中是看不到的。
明确的说,这些功能意味着驾驶员不仅可以看到高质量逼真的3D汽车模型,还可以将汽车周围环境实时投射到车内中控屏上。这样一来,驾驶员可以获得关于周围环境的准确反馈,使全景环视功能更加安全有效。

那么,这是怎么做到的?首先,汽车同时从摄像头捕捉四路信号,将它们整合在一起并映射到一个球面内。这会呈现出汽车及其周围环境的全景鸟瞰图,使驾驶员能够安全有效的泊车。然后我们可以使用全景鸟瞰图来计算实时反射以适应汽车周围的环境,并将其映射到汽车3D模型上,以获得额外的安全边界,同时让汽车和驾驶员能真实地感知到周围的环境。
这个Demo中的应用程序运行在RenesasR-Car H3处理器上,内部集成了PowerVR GX6650 GPU。当你将其与我们的专用神经网络加速器(NNA)PowerVR Series2NX AX2185匹配时,你就会看到我们的“AI Synergy”的优势,即我们将复杂的神经网络处理从GPU移植到NNA上,并且提高了GPU的计算利用率。
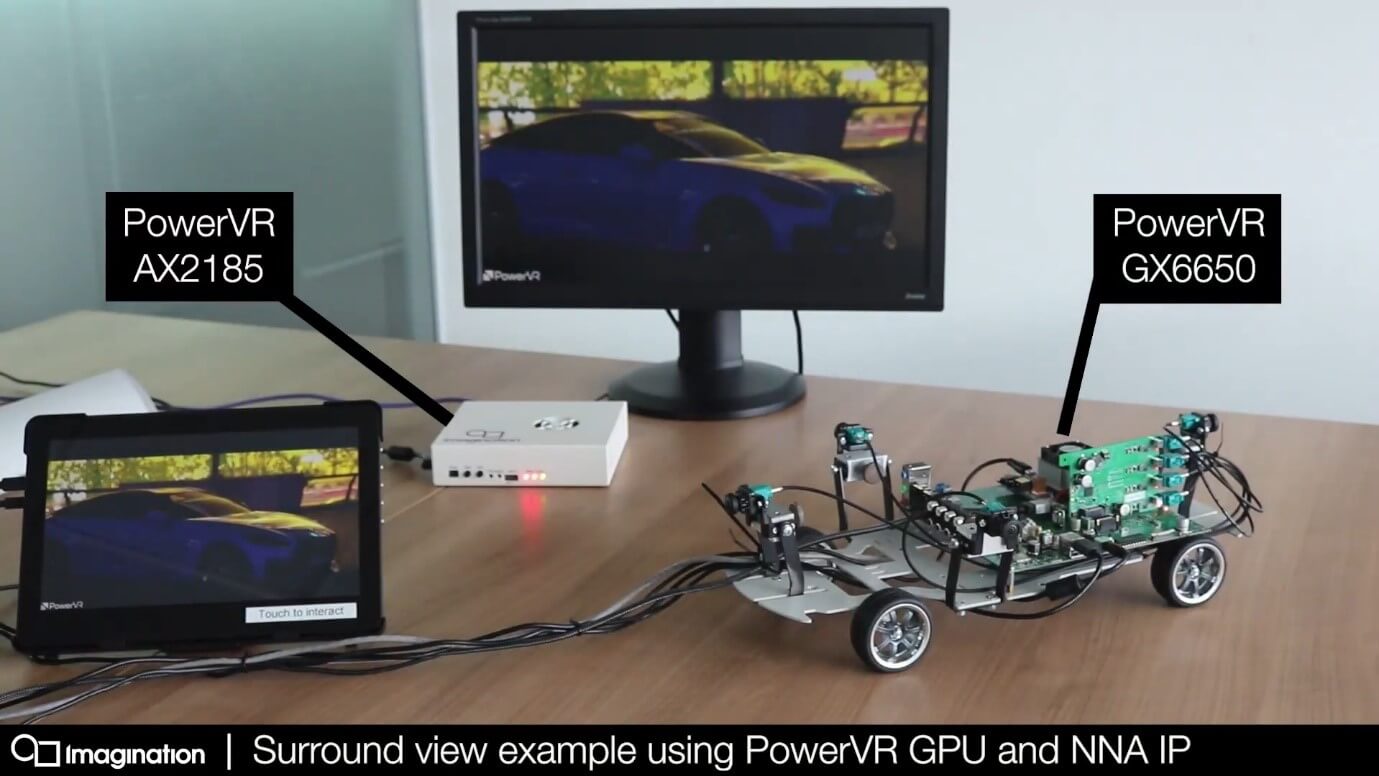
汽车渲染和摄像头拼接操作是在GPU上执行的,环境的球面映射传递给NNA(神经网络加速器),后者处理图像并检测物体和障碍。一旦检测通过完成,检测结果将会反馈给R-Car H3并将图像在球面内合成。
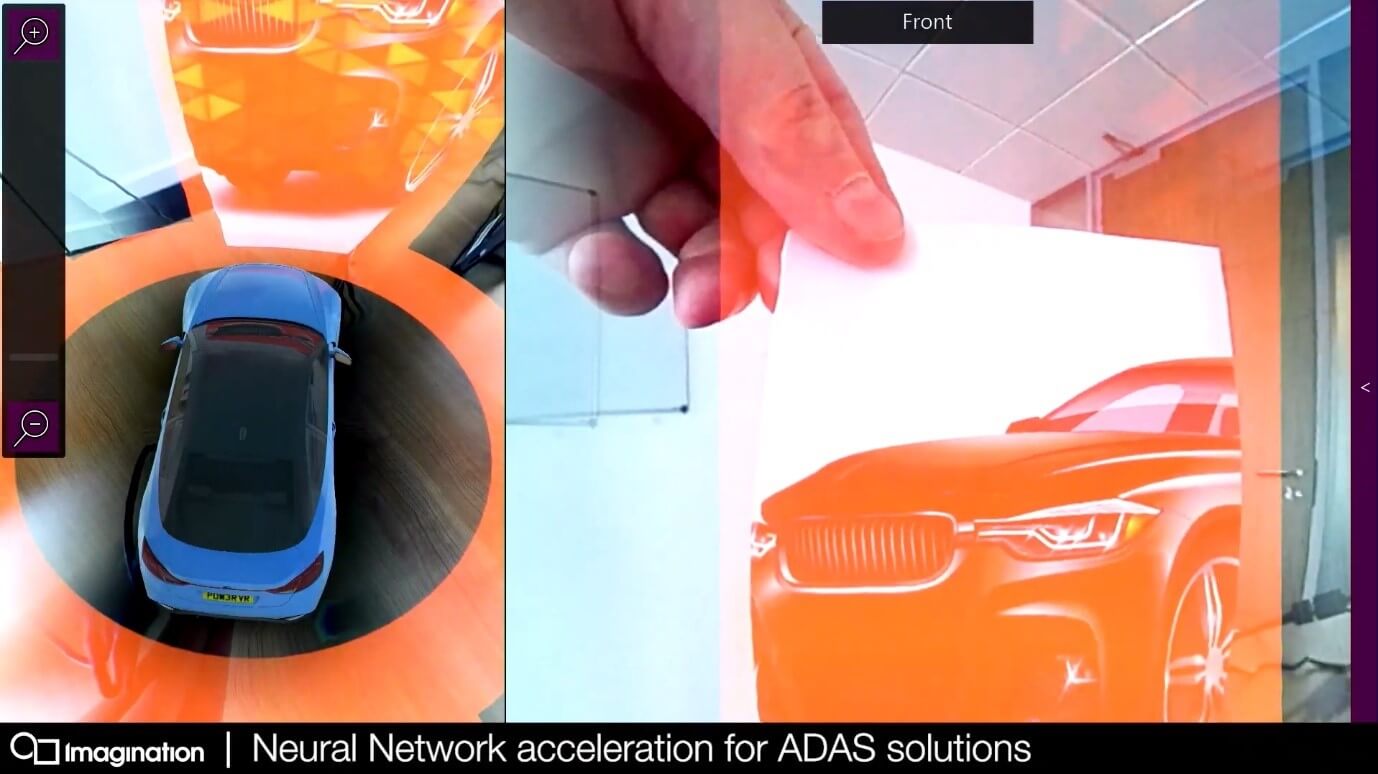
障碍物检测是通过训练在特定图像集合的神经网络来实现的。在本案例中我们使用GoogleNet单次扫描探测器(SSD)来检测行人、车辆以及许多其他物体。这仅仅涉及到人工智能(AI)浅层次应用,而我们也越来越清晰的看到自动驾驶成为汽车的新标准。神经网络将在这方面发挥关键作用,因为它们可以用来增强一系列ADAS系统,比如驾驶员监控以及路标识别等。
随着我们面向汽车行业的XS GPU系列产品的推出,Imagination提供一系列功能安全的GPU产品,这些GPU具有独特的安全机制,可以与强大的神经网络加速器(NNA)相结合,从而提供更快更智能的应用。
英文链接:https://www.imgtec.com/blog/making-smarter-and-safer-automotive-applicat...
声明:本文为原创文章,转载需注明作者、出处及原文链接,否则,本网站将保留追究其法律责任的权利。





