常见的十大物联网通讯技术优劣及应用场景
demi 在 周一, 10/08/2018 - 10:39 提交
如今,“万物互联”不只是一种愿景,在很多实际的应用场景里面,已经实现了局部的物联网,如工业自动化、智慧农业、智能公交、高端酒店等场所。物联网是未来十年最具有市场前景的领域,相关的无线通讯技术也逐步出现。
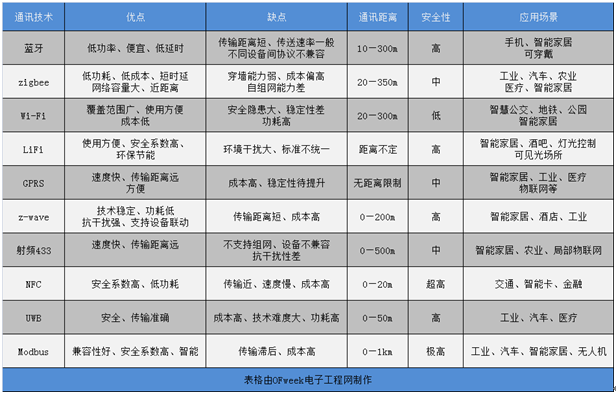
在实现物联网的通讯技术里面,蓝牙、zigbee、Wi-Fi、GPRS、NFC等是应用最为广泛的无线技术。除了这些,还有很多无线技术,它们在各自适合的场景里默默耕耘,扮演着不可或缺的角色。本文笔者将通过常见的十大无线通讯技术优劣及应用场景,带大家认识真正的物联网通讯技术。
十大物联网通讯技术优劣及应用场景
1、蓝牙的技术特点