作者:隐士低手
BVH和空间划分技术不同,它并不是通过切割空间来管理场景中的物件。它是通过将物体分堆,然后在其上面包裹一层BV,达到管理场景的目的。树的根节点是一个能够包裹全部物体的BV,而树的叶子节点可能只是一个物件的BV,如下图:

BV可以选择AABB,OBB,包围球等等,往往包裹性越好的BV,相交测试越复杂,但是包裹性好可以减少相交测试的次数。这个世界有阴就有阳,计算机的二进制码也是0和1,我们生存的世界是不是也是一个虚拟的程序呢,哈哈跑题了。
父节点的包围体无需包裹子节点的包围体,但是需要包裹所有物体的BV。换句话说就是父节点无需包裹中间节点的BV,但要能包裹所有物体。
我们从树根节点开始遍历每个子节点,如果节点的BV不在视锥体中或者没有发生碰撞,那么这个节点下的所有物体都可以快速被剔除。
BVH和BSP有点像,太过灵活,虽然原理很简单,但是如何建树是一个比较头疼的问题。建树困难也就意味着这个技术不适合运行时期动态更新。BVH和BSP一样往往是在非运行时期对静态物体进行预计算。
我们不能盲目的构建一棵BVH,先把树的期望特征列出来,以这些特征为目标构建BVH。
- 子树中的节点应该彼此靠近,随着深度的增加节点间应该彼此更加紧凑。
- 层次结构中的节点应该是最小的包围体。
- 全部包围体体积之和应该保持最小。
- 应谨慎处理根节点附件的节点,与深层节点相比,删除根节点附近的节点往往意味着移除更多的物体对象。
- 兄弟节点间的相交体空间应该保持最小。
- 层次结构应该尽量保持平衡树
- 最坏情况下的查询时间不应超出评价查询时间太多(防止造成游戏帧数不平滑)
- 虽然是预计算,但也要考虑预计算的时间,每次更改场景都需要重新计算,计算时间太长很容易影响工作效率。
- BVH应尽量控制内存的使用
有一个性能测试公式揭示了碰撞性能的消耗:
T = NvCv + NpCp + NuCu + Co
Nv是相交测试BV的数量,Cv是每次相交测试的消耗,Np是相交测试图元的数量,Cp是每次相交测试的消耗,Nu是需要更新节点的数量,Cu是更新节点的消耗,Co是一个常量消耗。
我们需要寻找一个折衷的方案来进行碰撞检测,写一个物理库不难,写一个高效的物理库很难。
树的构建策略
BVH可以自定向下构建,也可以自底向上构建,也可以插入的方式进行构建如下图:
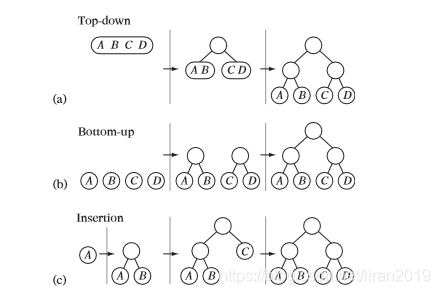
自顶向下构建容易,但是通常不是最佳树。
自底向上构建复杂,但是可以获得最佳树。
插入构建,可以实现运行时更新,但是该方案目前研究的比较少。
具体实现细节不写了,这个需要具体问题具体分析了。
版权声明:本文为CSDN博主(隐士低手)原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:https://blog.csdn.net/liran2019/article/details/107093952





