文章来自Manuel Silverio
对于汽车自动化,国际自动机工程师学会将其分为了6个等级——从0级到5级。其中,0级指没有实现自动化,还需人工驾驶,而5级则是能够实现完全自动化,驾驶过程中不需要人为干预。目前,我们离level 5 还有很大距离,自动化程度十分有限。不过,只要产业界和学术界持之以恒,实现完全自动驾驶也是迟早的事。
那么,为实现汽车自动化,关键技术又有哪些?本文将讨论与自动驾驶相关的技术,以及这些技术是如何集成在一起的。
车辆要实现自动驾驶需要3个关键因素:高精地图、状态和地理位置估计器以及一个运动管理器。不过,在具体了解这几个技术之前,我们还需先弄清楚其他几个工具。
自动驾驶汽车中的传感器
激光雷达:通过发射激光束来探测目标位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号即激光束,然后将接收到的从目标反射回来的信号与发射信号进行比较。这项技术被用来扫描道路和建筑物,通过激光雷达扫描,可以生成一个点的数据集,用以表示现实世界。


雷达:一种利用无线电波来测量距离、角度或物体运行速度的探测系统。在自动驾驶汽车中,雷达是最简单的传感器之一,虽然其测量的距离有限,不过与激光雷达相比,价格更便宜。目前,许多车辆已经使用雷达技术防止停车时的碰撞。
GPS:即全球定位系统,归属于美国政府,由美国空军运营。GPS是一个基于卫星的无线电导航系统,可向地球上或地球附近任何地方的GPS接收器提供地理位置和时间信息。
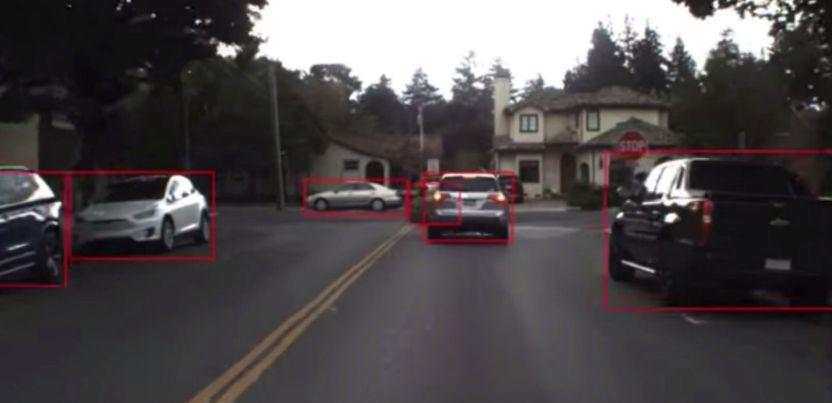
摄像头:摄像头是自动驾驶汽车重要的传感器,能够识别真实世界中的人和物。这得益于最近几年出现的计算机视觉技术、机器学习技术的发展,尤其是在卷积神经网络中,自动驾驶车辆可以使用摄像头进行目标的检测和识别。
自动驾驶汽车中的三大关键技术
关键1:HDMap(高精地图)
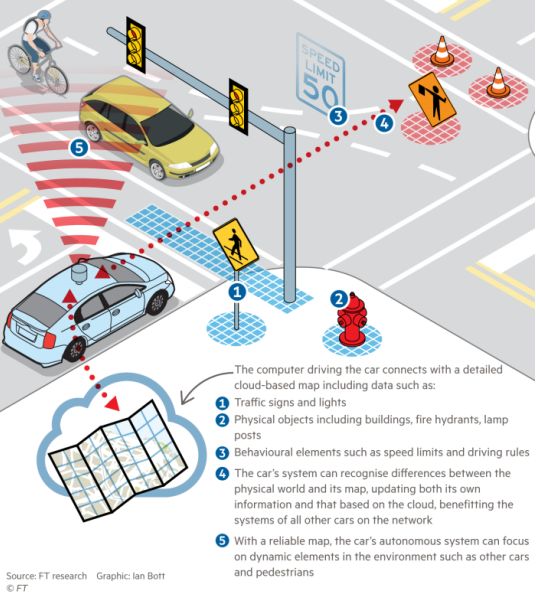
为完成自动驾驶的功能,汽车首先需要弄清楚它在世界上的位置。因此,一个HDMap是必不可少的,在HDMap中将包含大量关于道路和周围环境的数据。然而,构建一个HDMap需要很多的努力。甚至,有些公司唯一的目的就是构建HDMap,不断更新HDMap。
通过激光雷达扫描路面,计算机视觉将分析提取道路信号同时构建道路障碍物分布图。这些都是为了创建一个HDMap。自动驾驶汽车必须时刻清楚自己位于哪条道上,并且路线中还需包括所有必要的道路变更。

关键2:状态估计器
其次,汽车需要一个状态估计器。状态估计器将协调所有传感器提供的数据,并创建一个最新的HDMap中车辆的位置。
不同的情况可能需要不同的传感器。例如,如果车辆在建筑物内,GPS信号可能靠不住,状态估计器将需要依靠激光雷达、雷达等其他传感器或轮胎的运动来更新车辆的地理位置。此外,在高速公路(英国的高速公路)上,可能会出现卡车在车辆前面,挡住了激光雷达传感器的情况。这时依靠HDMap和GPS信号,我们的车辆能很好地识别前方道路的状况(下一个路口或出口)。
最后,状态估计器将接收并组合来自多个传感器的数据。然而,并不是所有的传感器都以相同的速率发送数据。一个激光雷达系统每毫秒可以提供多次脉冲,而GPS则需要更长的时间来更新。状态估计器需要协调这些信息。
关键3:运动管理器
运动规划器在自动驾驶汽车中主要负责运动的部分。如果我们打算把一辆自动驾驶汽车从A点开到B点,首先需要前进或倒退或转弯。运动管理器便是负责决定车辆在到达目的地的过程中需要做出哪些动作。根据状态估计器,车辆可以知道什么时候有障碍物阻碍了车辆的路线,随后运动管理器进行紧急停车。当车辆需要更换车道时,运动管理器会进行更换动作。因此,运动管理器是一个基于车辆路线的大型算法数据集。
本文转自:每日自动驾驶





