在 集成学习之Adaboost算法原理小结 中,我们对Boosting家族的Adaboost算法做了总结,本文就对Boosting家族中另一个重要的算法梯度提升树(Gradient Boosting Decison Tree, 以下简称GBDT)做一个总结。GBDT有很多简称,有GBT(Gradient Boosting Tree), GTB(Gradient Tree Boosting ), GBRT(Gradient Boosting Regression Tree), MART(Multiple Additive Regression Tree),其实都是指的同一种算法,本文统一简称GBDT。GBDT在BAT大厂中也有广泛的应用,假如要选择3个最重要的机器学习算法的话,个人认为GBDT应该占一席之地。
1. GBDT概述
GBDT也是集成学习Boosting家族的成员,但是却和传统的Adaboost有很大的不同。回顾下Adaboost,我们是利用前一轮迭代弱学习器的误差率来更新训练集的权重,这样一轮轮的迭代下去。GBDT也是迭代,使用了前向分布算法,但是弱学习器限定了只能使用CART回归树模型,同时迭代思路和Adaboost也有所不同。
在GBDT的迭代中,假设我们前一轮迭代得到的强学习器是 ft−1(x) , 损失函数是 L( y, ft−1(x) ),我们本轮迭代的目标是找到一个CART回归树模型的弱学习器 ht(x),让本轮的损失函数 L( y, ft(x) = L( y , ft−1(x) + ht(x) ) 最小。也就是说,本轮迭代找到决策树,要让样本的损失尽量变得更小。
GBDT的思想可以用一个通俗的例子解释,假如有个人30岁,我们首先用20岁去拟合,发现损失有10岁,这时我们用6岁去拟合剩下的损失,发现差距还有4岁,第三轮我们用3岁拟合剩下的差距,差距就只有一岁了。如果我们的迭代轮数还没有完,可以继续迭代下面,每一轮迭代,拟合的岁数误差都会减小。
从上面的例子看这个思想还是蛮简单的,但是有个问题是这个损失的拟合不好度量,损失函数各种各样,怎么找到一种通用的拟合方法呢?
2. GBDT的负梯度拟合
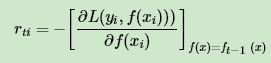
在上一节中,我们介绍了GBDT的基本思路,但是没有解决损失函数拟合方法的问题。针对这个问题,大牛Freidman提出了用损失函数的负梯度来拟合本轮损失的近似值,进而拟合一个CART回归树。第 t 轮的第 i 个样本的损失函数的负梯度表示为
利用 ( xi , rti )( i = 1 , 2, ... m ) , 我们可以拟合一颗CART回归树,得到了第t颗回归树,其对应的叶节点区域 Rtj , j = 1, 2 , ... , J 。其中J为叶子节点的个数。
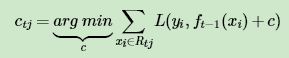
针对每一个叶子节点里的样本,我们求出使损失函数最小,也就是拟合叶子节点最好的的输出值 ctj 如下:
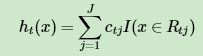
这样我们就得到了本轮的决策树拟合函数如下:
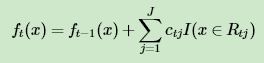
从而本轮最终得到的强学习器的表达式如下:
通过损失函数的负梯度来拟合,我们找到了一种通用的拟合损失误差的办法,这样无轮是分类问题还是回归问题,我们通过其损失函数的负梯度的拟合,就可以用GBDT来解决我们的分类回归问题。区别仅仅在于损失函数不同导致的负梯度不同而已。
3. GBDT回归算法
好了,有了上面的思路,下面我们总结下GBDT的回归算法。为什么没有加上分类算法一起?那是因为分类算法的输出是不连续的类别值,需要一些处理才能使用负梯度,我们在下一节讲。
输入是训练集样本 T = { ( x , y1 ) , ( x2 , y2 ),...( xm , ym ) }, 最大迭代次数 T , 损失函数L。
输出是强学习器 f(x)
1) 初始化弱学习器
2) 对迭代轮数 t = 1, 2 , ... T 有:
a)对样本 i 1, 2, ... m , 计算负梯度
b)利用( xi , rti )( i = 1 , 2 , .. m) , 拟合一颗CART回归树,得到第t颗回归树,其对应的叶子节点区域为 Rtj , j = 1, 2 , ... , J 。其中J为回归树t的叶子节点的个数。
c) 对叶子区域 j =1 , 2 , .. J , 计算最佳拟合值
d) 更新强学习器
3) 得到强学习器f(x)的表达式

4. GBDT分类算法
这里我们再看看GBDT分类算法,GBDT的分类算法从思想上和GBDT的回归算法没有区别,但是由于样本输出不是连续的值,而是离散的类别,导致我们无法直接从输出类别去拟合类别输出的误差。
为了解决这个问题,主要有两个方法,一个是用指数损失函数,此时GBDT退化为Adaboost算法。另一种方法是用类似于逻辑回归的对数似然损失函数的方法。也就是说,我们用的是类别的预测概率值和真实概率值的差来拟合损失。本文仅讨论用对数似然损失函数的GBDT分类。而对于对数似然损失函数,我们又有二元分类和多元分类的区别。
4.1 二元GBDT分类算法
对于二元GBDT,如果用类似于逻辑回归的对数似然损失函数,则损失函数为:

其中 y∈{−1,+1}。则此时的负梯度误差为

对于生成的决策树,我们各个叶子节点的最佳负梯度拟合值为

由于上式比较难优化,我们一般使用近似值代替
除了负梯度计算和叶子节点的最佳负梯度拟合的线性搜索,二元GBDT分类和GBDT回归算法过程相同。
4.2 多元GBDT分类算法
多元GBDT要比二元GBDT复杂一些,对应的是多元逻辑回归和二元逻辑回归的复杂度差别。假设类别数为K,则此时我们的对数似然损失函数为:

其中如果样本输出类别为 k,则 yk = 1。第k类的概率pk(x)的表达式为:
集合上两式,我们可以计算出第 t 轮的第 i 个样本对应类别l的负梯度误差为

观察上式可以看出,其实这里的误差就是样本i对应类别l的真实概率和t−1轮预测概率的差值。
对于生成的决策树,我们各个叶子节点的最佳负梯度拟合值为

由于上式比较难优化,我们一般使用近似值代替
除了负梯度计算和叶子节点的最佳负梯度拟合的线性搜索,多元GBDT分类和二元GBDT分类以及GBDT回归算法过程相同。
5. GBDT常用损失函数
这里我们再对常用的GBDT损失函数做一个总结。
对于分类算法,其损失函数一般有对数损失函数和指数损失函数两种:
a) 如果是指数损失函数,则损失函数表达式为

其负梯度计算和叶子节点的最佳负梯度拟合参见Adaboost原理篇。
b) 如果是对数损失函数,分为二元分类和多元分类两种,参见4.1节和4.2节。
对于回归算法,常用损失函数有如下4种:
a)均方差,这个是最常见的回归损失函数了
b)绝对损失,这个损失函数也很常见
对应负梯度误差为:

c)Huber损失,它是均方差和绝对损失的折衷产物,对于远离中心的异常点,采用绝对损失,而中心附近的点采用均方差。这个界限一般用分位数点度量。损失函数如下:

对应的负梯度误差为:

d) 分位数损失。它对应的是分位数回归的损失函数,表达式为

其中θ为分位数,需要我们在回归前指定。对应的负梯度误差为:

对于Huber损失和分位数损失,主要用于健壮回归,也就是减少异常点对损失函数的影响。
6. GBDT的正则化
和Adaboost一样,我们也需要对GBDT进行正则化,防止过拟合。GBDT的正则化主要有三种方式。
第一种是和Adaboost类似的正则化项,即步长(learning rate)。定义为ν,对于前面的弱学习器的迭代

如果我们加上了正则化项,则有

ν 的取值范围为 0 < ν≤1。对于同样的训练集学习效果,较小的ν意味着我们需要更多的弱学习器的迭代次数。通常我们用步长和迭代最大次数一起来决定算法的拟合效果。
第二种正则化的方式是通过子采样比例(subsample)。取值为(0,1]。注意这里的子采样和随机森林不一样,随机森林使用的是放回抽样,而这里是不放回抽样。如果取值为1,则全部样本都使用,等于没有使用子采样。如果取值小于1,则只有一部分样本会去做GBDT的决策树拟合。选择小于1的比例可以减少方差,即防止过拟合,但是会增加样本拟合的偏差,因此取值不能太低。推荐在[0.5, 0.8]之间。
使用了子采样的GBDT有时也称作随机梯度提升树(Stochastic Gradient Boosting Tree, SGBT)。由于使用了子采样,程序可以通过采样分发到不同的任务去做boosting的迭代过程,最后形成新树,从而减少弱学习器难以并行学习的弱点。
第三种是对于弱学习器即CART回归树进行正则化剪枝。在决策树原理篇里我们已经讲过,这里就不重复了。
7. GBDT小结
GBDT终于讲完了,GDBT本身并不复杂,不过要吃透的话需要对集成学习的原理,决策树原理和各种损失函树有一定的了解。由于GBDT的卓越性能,只要是研究机器学习都应该掌握这个算法,包括背后的原理和应用调参方法。目前GBDT的算法比较好的库是xgboost。当然scikit-learn也可以。
最后总结下GBDT的优缺点。
GBDT主要的优点有:
1) 可以灵活处理各种类型的数据,包括连续值和离散值。
2) 在相对少的调参时间情况下,预测的准确率也可以比较高。这个是相对SVM来说的。
3)使用一些健壮的损失函数,对异常值的鲁棒性非常强。比如 Huber损失函数和Quantile损失函数。
GBDT的主要缺点有:
由于弱学习器之间存在依赖关系,难以并行训练数据。不过可以通过自采样的SGBT来达到部分并行。
以上就是GBDT的原理总结,后面会讲GBDT的scikit-learn调参,敬请期待。
(欢迎转载,转载请注明出处。欢迎沟通交流: liujianping-ok@163.com)
本文转自:博客园 - 刘建平Pinard,转载此文目的在于传递更多信息,版权归原作者所有。





