文 | HYZY
来源:焉知自动驾驶
目前ADAS常用的环境感知传感器主要有摄像头、毫米波雷达和超声波雷达三种,本文将针对这三种传感器进行介绍,其它应用较少的红外传感器、激光雷达等本文不予涉及。
一、 摄像头
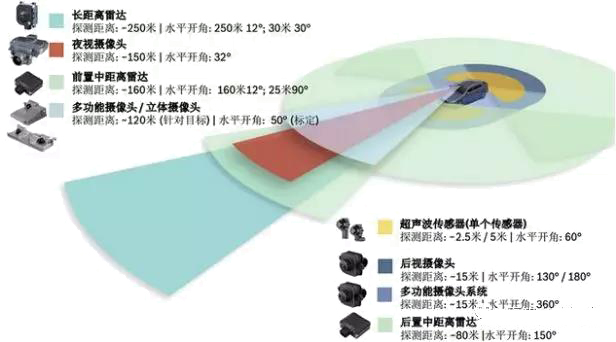
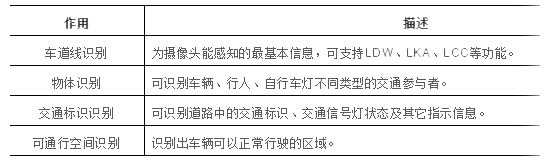
摄像头安装使用简单、获取的图像信息量大、投入成本低、作用范围广,并且近些年更是得益于数字图像处理技术的快速发展和计算机硬件性能的提高,已经成为ADAS不可或缺的一类传感器。摄像头在ADAS中的主要作用见表1。
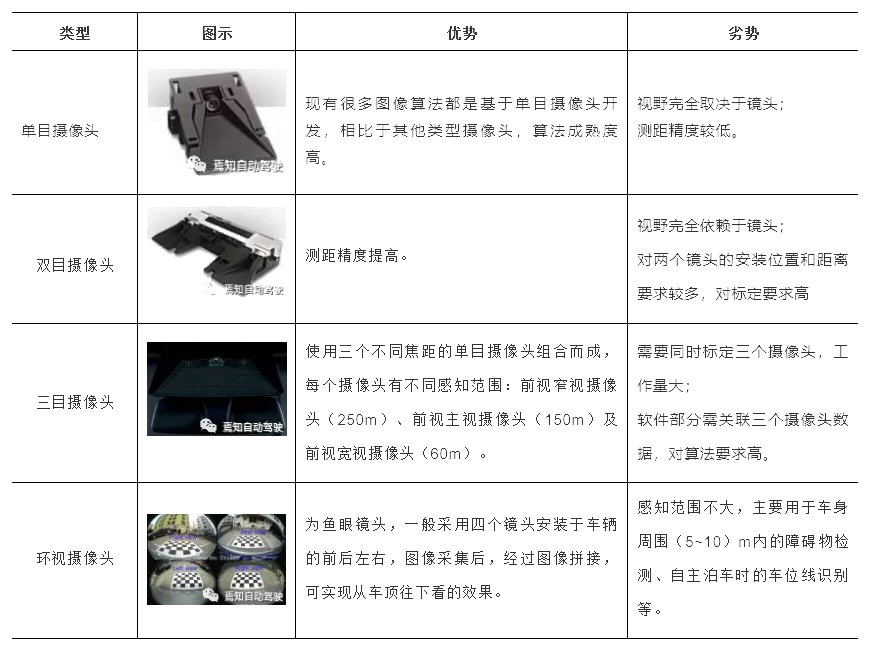
摄像头根据镜头和布置方式的不同可分为以下四类:单目摄像头、双目摄像头、三目摄像头和环视摄像头,具体见表2。
摄像头的弱点在于其识别能力受环境影响非常大,雨雪雾沙尘霾都会使其识别能力减低,抵抗强光的能力也不够强。另外摄像头对于模棱两可的目标识别能力有限,对于没见过的目标也不容易正确分类。
二、 毫米波雷达
毫米波是指长度在(1~10)mm的电磁波,对应的频率范围在(30~300)GHz,毫米波雷达就是工作在毫米波频段的雷达,见图2。

毫米波位于微波与远红外波相交叠的波长范围,所以毫米波兼有这两种波谱的优点,同时也有自己独特的性质:相比于微波,毫米波分辨率高、指向性好、抗干扰能力强和探测性能好;相比于红外波,毫米波的大气衰减小、对烟雾灰尘具有更好的穿透性、受天气影响小。以上这些特质决定了毫米波雷达具有全天时、全天候的工作能力。
车载毫米波雷达可用频段有24GHz、(60~61)GHz和(76~79)GHz,目前主流的为24GHz和(76~79)GHz,(60~61)GHz只有日本使用。毫米波雷达频率越高、波长越短,其测距测速的精度就越高,目前毫米波雷达的发展趋势是从低频向高频过度。
为了满足不同探测距离的需求,通常一辆车上会安装多个短程、中程和长程毫米波雷达,其中24GHz雷达主要用于近距离探测(SRR)、(76~79)GHz雷达主要用于中远距离的探测(MRR、LRR)。目前已量产的前雷达探测距离可达到200m左右, 2021年将会量产的前雷达探测距离可达到(250~300)m。
三、超声波雷达
超声波雷达是利用传感器内的超声波发生器产生 40KHz 的超声波,再由接收探头接收经障碍物反射回来的超声波,根据超声波反射接收的时间差计算与障碍物之间的距离,见图3。超声波雷达成本较低,探测距离精度高,且不受光线条件的影响,因此常用于泊车系统中。

常见的超声波雷达有两种:第一种称为UPA,安装在汽车前后保险杠上,用于探测汽车前后障碍物,探测距离一般在(0.15~2.5)m;另一种称为APA,安装在汽车侧面,用于探测汽车侧方障碍物,探测距离一般在(0.3~5)m。泊车系统一般配备前后共8个UPA,左右侧共4个APA。
超声波雷达的弱点在于:受环境温度影响较大(不同环境温度下,超声波传播速度有差异)、无法精确描述障碍物位置及响应时间较慢。
四、三类传感器的对比
从前文可以看出,ADAS主要的三类传感器具有不同的特点,见表3。
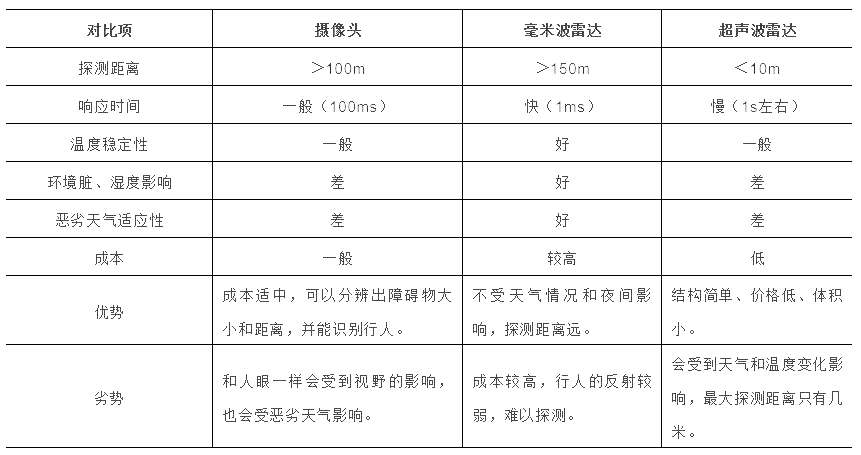
在现有技术条件下,每种传感器都有自身的弱点,难以靠单一类型传感器完成所有ADAS的感知任务。因此,将不同种类型传感器的信息组合在一起,实现传感器信息融合为ADAS的发展趋势。
文 | HYZY
来源:焉知自动驾驶





