无人驾驶汽车
无人驾驶汽车,又称自动驾驶汽车或轮式移动机器人,是一种运输动力的无人地面载具。我们理想的无人驾驶汽车是无需人类操作即能从地点A行驶到地点B,不管途中环境多复杂天气多恶劣都由机器自己完成。无人驾驶汽车的核心在于无人驾驶技术,如果说汽车工业是制造业的皇冠,那么无人驾驶技术就是皇冠上的明珠。
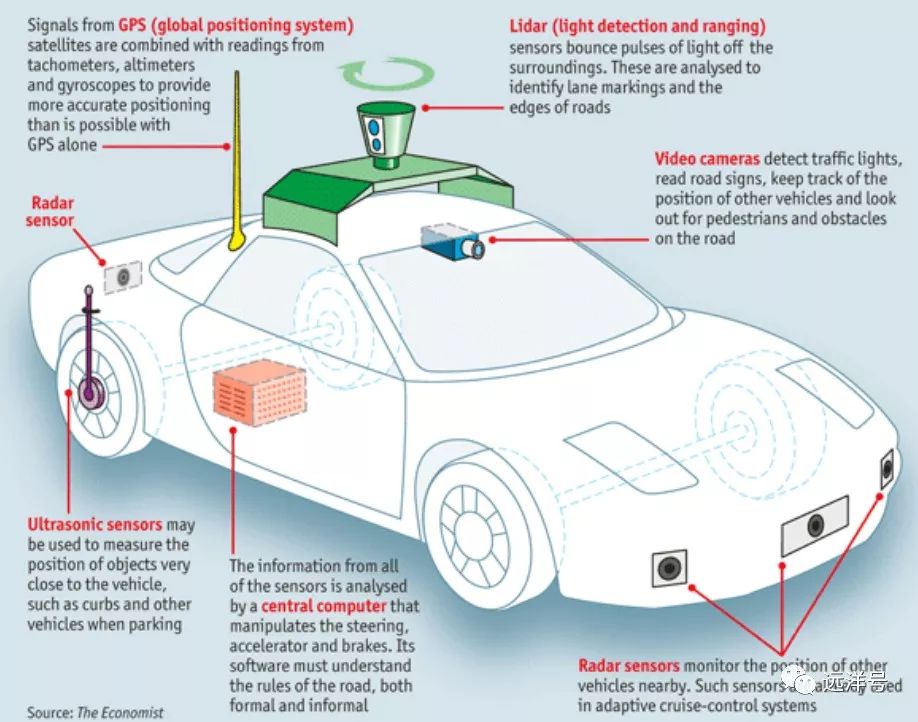
无人驾驶汽车需要多门技术整合才能实现,它并非是一项单一的新技术,其中包括雷达、激光雷达、摄像头、GPS、计算机视觉、决策系统、操作系统、高精地图、实时定位、机械控制、能耗散热管理等等。尽管无人驾驶汽车看起来很科幻,但实际上梦想正在照进现实。

无人驾驶分级
针对无人驾驶汽车自动化的程度一般可以分为6个级别,按照自动化程度从低到高顺序分别为Level 0 到Level 5。
Level 0:无任何自动化驾驶功能,行驶过程完全依靠人类司机控制汽车,包括汽车启动、行驶过程中的各种环境状况的观察、各种操作决策等等。简单来说,需要人类控制驾驶的汽车都属于这个级别。
Level 1:单一功能自动化,行驶过程中将部分控制权交给机器管理,但是司机仍然需要把控整体。比如自适应巡航、应急刹车辅助、车道保持等等。司机手脚不能同时脱离控制系统。
Level 2:部分自动化,行驶过程中司机和汽车共享汽车控制权,在某些预设环境下司机能够完全脱离控制系统,但司机需要随时待命,且需要在短时间内接管汽车。
Level 3:有条件自动化,在有限情况下实现自动行驶。比如在高速路上机器完全负责整个汽车的操控,司机可以完全完全脱离控制系统,司机需要随时待命,但有足够的预警时间。
Level 4:高度自动化,在特定道路限定下行驶过程中无需司机介入。司机仅需要设置好起点和终点即可,剩下的交由汽车自行控制。
Level 5:完全自动化,在任何环境中行驶都无需司机介入。司机仅需要设置好起点和终点即可,剩下的交由汽车自行控制。
无线雷达
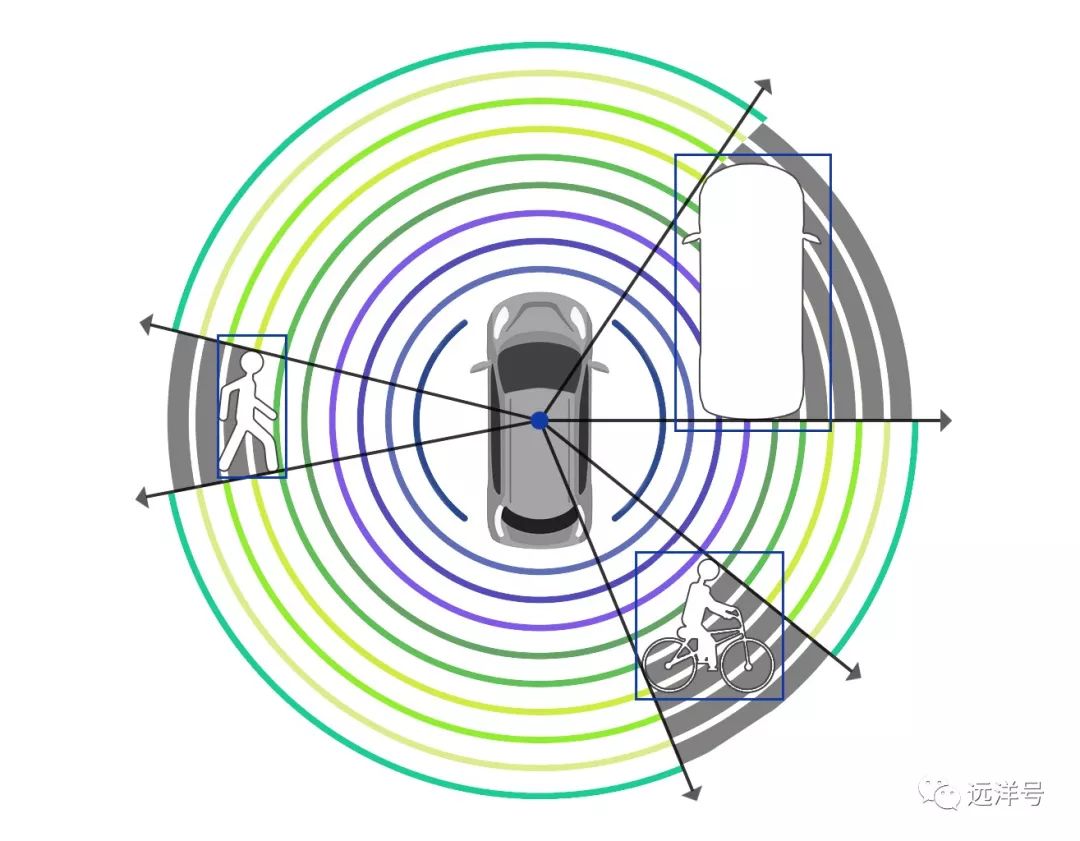
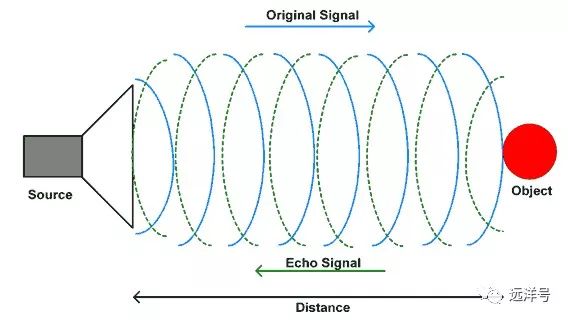
无线雷达(Radio Detection and Ranging)是汽车上很常见的组件,它的工作原理是发射出无线电波后经过远处物体将无线电波反射回来从而达到探测效果。通过无线雷达能够获得物体的数量、大小、运动速度、运动方向等等信息,在无人驾驶领域它经常被用于自适应巡航和自动紧急制动场景。
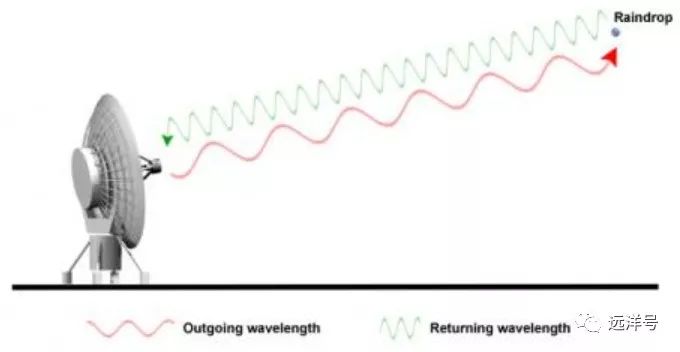
雷达向目标区域发出无线电波,某个物体将无线电波反射回来,便能够计算两者之间的距离。距离d=c⋅t/2,其中t为从无线电波发射到反射回来的时间间隔,c为光速(3⋅10的八次方米每秒)。
雷达可用来识别数百码之外的物体,并且能够检测它的大小及运动速度。但它不能够捕获到物体的细节。
激光雷达
激光雷达LiDAR(Light Detection and Ranging),即激光探测及测距系统,是以发射激光束来探测物体的雷达系统。其工作原理是向目标物体发射大量激光束探测信号,然后接收器处理目标反射回来的信号即可获得目标的有关信息,比如目标的距离、方位、高度、速度、姿态、甚至形状等信息。无人驾驶汽车的激光雷达一般都安装在车顶上,不断地高速旋转对周围环境进行扫描,通过它能够得到周围物体的三维信息。
激光雷达
激光雷达的测量原理相对比较简单,比如下图中车上的激光雷达向目标物体发出一束激光,就可以通过光速来计算距离了,而加上光束的角度后则能得到更多指标。
对于实际立体物体,通过激光雷达对整个物体扫描就能够形成3D点云。激光雷达对目标发射出多个光束,接收器接收反射回来的光束后对信号进行处理,从而形成3D点云。
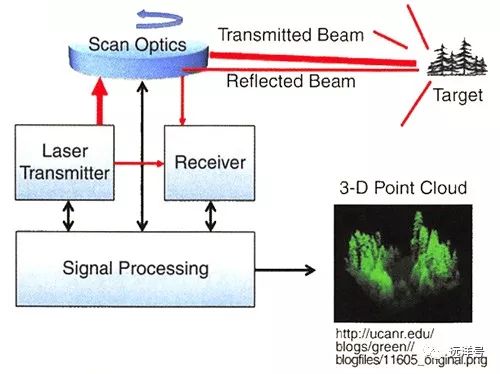
激光雷达提供了比无线雷达更高分辨率的解决方案,能比无线雷达捕获更多信息。激光雷达造价贵,运行时需要不停旋转,同时它无法在多雾多尘的天气工作。
摄像头
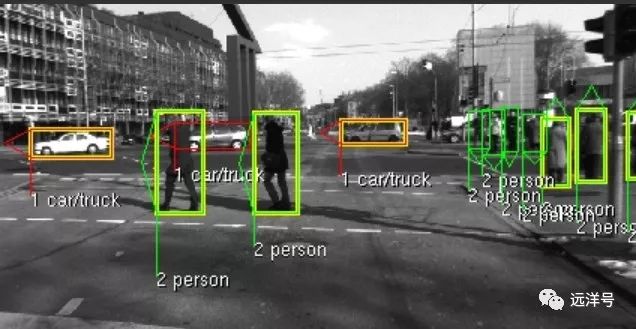
为了捕获更多的图像细节,我们需要在无人驾驶汽车上增加摄像头,比如要识别公路上的路标。摄像头能够得到无人驾驶汽车周围最准确的视图,提供了最高分别率图像。摄像头受天气影响很大,比如晚上摄像头就影响很大。
对于捕获到的图像,要识别里面的物体就需要机器学习来加持。而目前流行的图像识别使用的都是深度学习,核心就是卷积神经网络。前面的神经网络工作原理章节和深度学习原理章节已经讲解了相关的原理,所以通过深度卷积神经网络是对摄像头收集的图像进行处理的核心。
无人车经过摄像头捕获的镜头通过深度学习能够识别出图像中包含的物体,比如行人、行车、交通路标等等。对应计算机视觉的物体检测与物体分类任务,经典的算法包括R-CNN、Faster R-CNN、SSD、YOLO等等。
超声波雷达
除了以上传感器外,无人驾驶汽车一般还会安装有超声波雷达。超声波雷达又称倒车雷达,很明显它主要是为倒车做辅助的。它的工作原理是通过超声波发射装置向外发射超声波,然后通过接收器接收反弹回来的超声波,根据时间差来计算距离。距离d=343⋅时间/2,其中343位声波速度,343m/s。超声波雷达的探测范围一般在几米以内,探测精度较高,适合用于泊车。
GPS
GPS是最常用的定位技术,在无人驾驶汽车中会通过其进行定位。GPS的更新频率为10Hz,所以它缺乏实时性。此外,GPS民用版的误差能达到好几米,所以完全靠GPS进行定位导航非常容易导致交通事故。
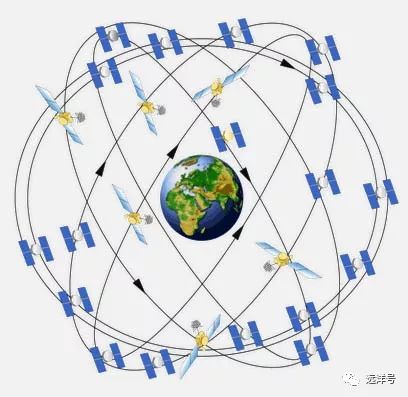
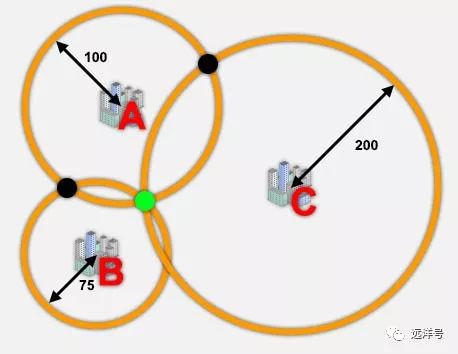
GPS的定位使用了三边测量法,卫星与接收装置之间的距离通过传输时间来测量距离,然后通过多颗卫星的位置便能够计算接收装置的位置,GPS一般会使用4颗以上的卫星来定位接受装置的3D位置信息。
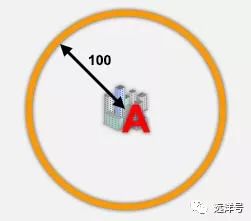
下面通过一个例子来理解2D的三边测量法,比如你的位置与A卫星的距离为100km,则你可能的位置是在以A卫星为中心的一个圆上。
接着你又向另外一个卫星B发出无线信号,测量的距离时75km,则此时你的位置有两种可能,就是两个圆的相交点。
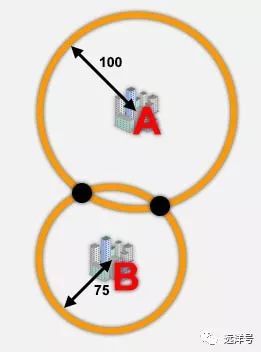
最后向卫星C发出无线信号,测量得出的距离为200km,此时三个圆的相交点就能唯一定位一个位置,这个位置即是你的位置。也就是说三个卫星就能确定一个平面上的点,只要坐标系建立起来便能得到详细的xy值。
高精地图
高精地图是无人驾驶汽车重要的支撑,它包含了大量的行车辅助信息,除了能提供精确的定位外,它还能做智能避让、智能调速等等。高精地图能为无人车提供静态的感知能力,为无人车提供全局视野,比如道路、交通、基础设施等信息。
我们现在日常使用的电子地图为传统电子地图,它能用于查询地点和导航,主要面向人类驾驶员。而高精电子地图则能提供比传统电子地图更多的信息,主要面向无人车。无人车车身上的传感器能收集到的主要信息范围都非常有限,而通过高精电子地图则能够将无人车的感知能力范围大大延伸,而且能够得到更多准确的信息。

高精地图包含了很多辅助信息。比如包括车道的位置、宽度、斜度、类型、曲率等等公路数据信息。比如包括交通标识、信号灯、障碍物、道路限高、防护栏、树、围栏、地标等等环境数据信息。如果进一步对高精电子地图的模型进行抽象,则可以得到更多无人车与车道、交通、基础设施之间的信息。
相比于GPS,高精电子地图能够实现比GPS高10倍以上的精度,GPS精度一般在几米,而高精地图与传感器协作则能使精度达到厘米级别。
惯性测量装置
惯性测量装置(IMU)是一种测量加速度与角速度的传感器。无人车一般使用的是中低级惯性传感器,更新频率为1kHz,价格为几千块。惯性能协助无人车进行定位,但因为它的误差会随着时间而累积,所以只能用于很短时间内的定位。
为了方便理解惯性测量装置的加速度,我们可以将加速度计想象成一个箱子里面悬浮着一个球,它们处于无重力的太空中。当我们向左边施加一个重力加速度(1g)时,球会向X-方向的壁平面产生1g的压力,然后我们就能够测量到x轴上的加速度为-1g。

惯性测量装置还包含了角速度测量功能,陀螺可以绕着支点进行三个自由度的转动。如下面的陀螺仪中间有一根竖轴穿过一个金属圆盘,圆盘称为转子,竖轴为旋转轴。为了增加惯性,转子用质量大的金属制成。竖轴外侧由三层不同大小的圆环嵌套而成,拥有三个方向自由度。角速度的测量则主要是利用角动量守恒定理。
V2X与环境交互
V2X通信传感是无人车与周围环境的通信协议,包括车与车通信(Vehicle to Vehicle,V2V)、车与基础设施通信(Vehicle to Infrastructure,V2I)、车与行人通信(Vehicle to Pedestrian,V2P)。
V2V通信指无人驾驶汽车之间进行信息交换,比如无人驾驶车之间交换交通状况。V2I通信指无人驾驶汽车与基础设施之间进行信息交换,比如智能停车场与无人驾驶汽车的通信。V2P通信指无人驾驶汽车与行人之间进行信息交换,比如通过智能手机应用与无人驾驶汽车通信。
路径规划
路径规划主要解决的问题是找到一条最快最安全的从起点到终点的路径,路径规划中有很多成熟的算法,比如Dijkstra算法、A*算法、RRT算法等等。无人驾驶汽车的路径规划需要考虑多因素的影响,比如车祸路道、交通拥堵等。

总结
无人驾驶汽车的核心是感知能力,无人车有四种不同视野的眼睛,包括无线雷达、激光雷达、超声波雷达和摄像头,通过它们能得到不同的视野。在定位方面无人驾驶汽车使用GPS与惯性策略装置,再加上高精电子地图就能够实现非常精准的定位。此外,为了能让无人车与环境进行通信交互,V2X被提出来,包括V2V、V2I、V2P。
来源:远洋号,作者:wj seaboat
原文链接:https://mp.weixin.qq.com/s/VAchQR-8q0bAMYg6SEAF1A
转载此文目的在于传递更多信息,版权归原作者所有。





