作者:Functional Safety Expert
如今说起汽车行业的网红代表,“自动驾驶”当之无愧。从自动驾驶概念推出以来,行业大佬们都跃跃欲试,各种自动驾驶生态圈层出不穷,自动驾驶也必然是未来汽车科技发展的趋势。但到底什么是自动驾驶,不同级别的自动驾驶分别能实现什么样的自动化水平,在开发自动驾驶系统时如何正确定义级别,目前网络上和行业里各种鱼龙混杂的说法让我们眼花缭乱,今天通过这篇文章的详细解读,深入浅出,带你彻底搞懂汽车自动驾驶级别分类。
自动驾驶分级来源
自动驾驶级别有两种分类方式,一种是美国汽车工程学会SAE的自动驾驶分级L0-L5共6个级别,一种是美国国家公路交通安全管理局NHTSA的自动驾驶分级L0-L4共5个级别。两者分级体系类似,描述略有差别,2016年,美国交通部确定采用SAEJ3016作为自动驾驶分级标准。目前,大多数政府和企业都是采用SAE标准分级,我国基于SAE J3016也在制定相应的国标。
注:2013年, NHTSA率先发布自动驾驶分级标准, 2014年,SAE制定了J3016自动驾驶分级标准并在2018年进行了更新。
SAE分级与NHTSA分级对比如下:

注:本文基于SAE标准的自动驾驶级别分类L0-L5进行解读。
名称对比
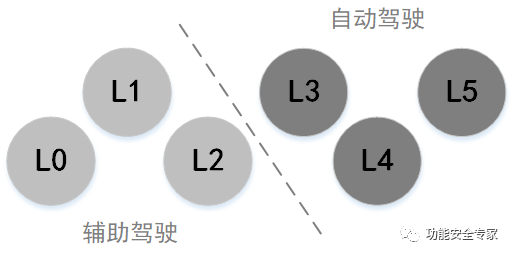
首先,给每个自动驾驶级别起个小名,有助于大家对级别的认识与理解。但在介绍小名前,需要说明一点,L0级不是无驾驶自动化,这是需要大家特别注意的,因为目前大多数人此理解都有误区,包括网上有些解读也是带有误解。
L0级可以提供一些安全辅助的功能,例如感知环境和提示报警,因此关于L0级-L5级的名称如下定义最合适:
• L0安全辅助驾驶
• L1部分辅助驾驶
• L2辅助驾驶
• L3有条件自动驾驶
• L4高度自动驾驶
• L5完全自动驾驶
从小名上可以看出,真正的自动驾驶是从L3级别开始的,而L0-L2更确切的说应为辅助驾驶。
定义与要求
在介绍自动驾驶各个级别详细的定义与要求前,先介绍几个重要的信息:
1、目标和事件的探测与响应:顾名思义,对环境、目标或事件等进行感知、检测,并做出相应的处理。
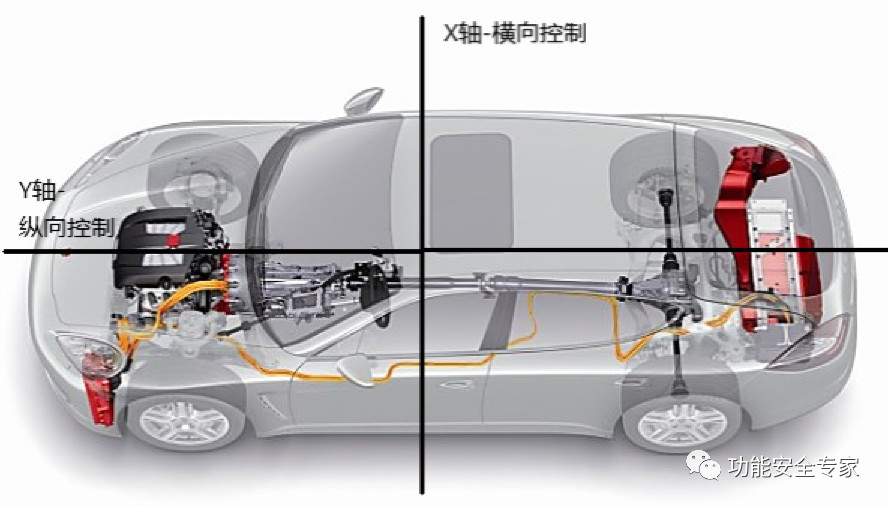
2、横向控制和纵向控制:通俗来讲,横向控制就是控制车辆左右运动(图中X轴);纵向控制就是控制车辆前后运动(图中Y轴)。
3、动态驾驶任务接管:就是在系统发生失效或超出运行范围时,由用户来接管还是由自动化系统进行风险最小的处理。
4、运行条件限制:在系统设计时对车辆的运行场景、交通状况、运行道路、运行时间和车速等条件进行限制。
了解了以上这些词,我们就可以通过一系列表格对比,直观搞懂各个自动驾驶级别的要求了:
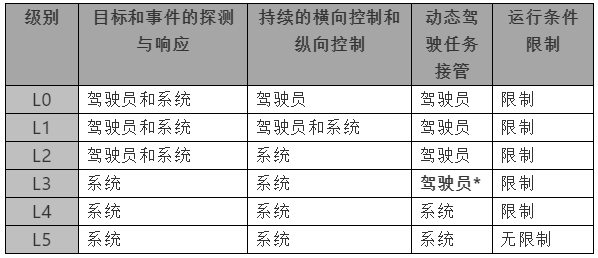
注:其中L3级别动态驾驶任务接管可以由用户在接管后成为驾驶员,而不是传统意义的驾驶员。
L1级别横向控制和纵向控制系统不能同时控制,只能控制其一,由驾驶员控制另一个方向的运动。
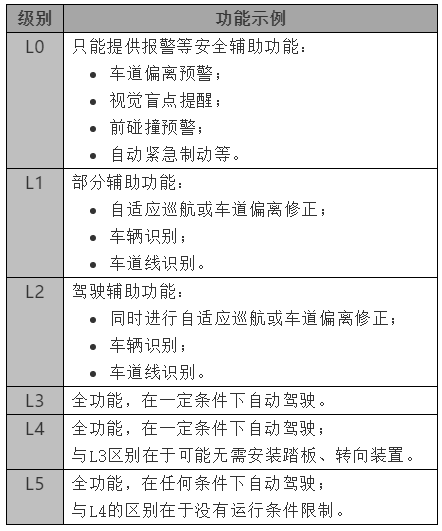
了解了自动驾驶级别L0-L5的基本差别后,下面举一些功能示例让大家更深刻的理解其含义。
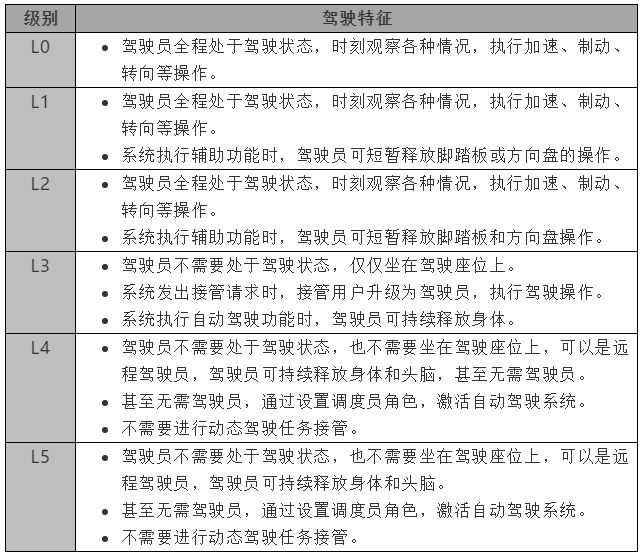
那么在不同的自动驾驶级别上,对于驾驶员的要求又有哪些具体变化呢,我们详细对比一下:
总结
自动驾驶级别分类L0-L5,每个级别之间都存在着联系,但也都有着本质的差别:
L0是无自动驾驶与有自动驾驶的分水岭,L0不是无自动驾驶,而是有感知报警的安全辅助驾驶;
L1是系统执行持续驾驶控制的分水岭,从L1开始系统能够执行持续的横向控制或纵向控制;
L2和L1很相似,差别在于持续的横向控制和纵向控制,L1在同一时间只能控制其一,L2可同时控制两个方向轴上的运动;
L3是辅助自动驾驶与真正自动驾驶的分水岭,从L3开始解放驾驶员,是真正的自动驾驶的开端;
L4是动态驾驶任务由人接管与由系统接管的分水岭,从L4开始由系统进行动态驾驶任务接管;
L5是运行条件是否限制的分水岭,从L5开始自动驾驶达到巅峰,系统可以在任何条件下进行完全自动驾驶。
本文转自:功能安全专家,作者:Functional Safety Expert,转载此文目的在于传递更多信息,版权归原作者所有。





