来源:小白玩转Python
作者:二旺
R-CNN(Regions with Convolutional Neural Networks)家族包括几种模型,它们通过利用区域提议网络和深度学习技术来改进目标检测。
Faster R-CNN:作为R-CNN家族的扩展,Faster R-CNN使用区域提议网络(RPN)生成物体的潜在边界框,然后应用CNN进行分类和细化。
Mask R-CNN:作为Faster R-CNN的扩展,Mask R-CNN除了边界框分类外,还增加了一个分支来预测每个感兴趣区域(RoI)的分割掩码。
R-CNN
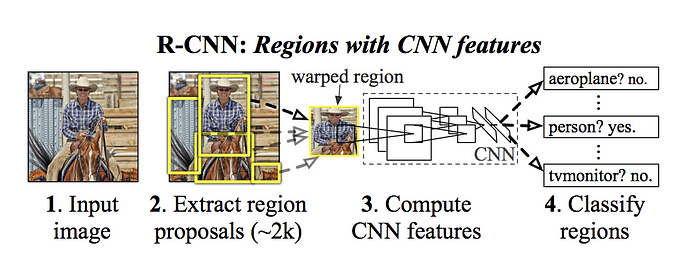
原始的R-CNN模型引入了目标检测的两阶段方法。它首先使用选择性搜索生成区域提议,然后使用CNN对这些区域进行分类。虽然有效,但由于独立的阶段,它的计算成本很高。
区域提议:首先使用选择性搜索等方法生成潜在的物体位置(感兴趣区域)。
特征提取和分类:然后调整每个提议区域的大小并输入CNN进行特征提取。CNN对每个区域的内容进行分类并预测边界框。
限制
R-CNN的计算成本可能很高,因为它单独处理每个区域提议,导致冗余的特征提取和增加的处理时间。
R-CNN(Regions with Convolutional Neural Networks)与CNN(Convolutional Neural Networks)
1. 架构
CNN:标准的CNN由卷积操作层、池化层和全连接层组成。架构旨在直接从图像中提取特征(特征提取和分类)。
R-CNN:R-CNN涉及两阶段方法:区域提议 + 特征提取和分类
2. 输出
R-CNN的输出包括多个边界框、相关的类别标签和置信度分数,指示图像中多个物体的存在和位置。
Fast R-CNN
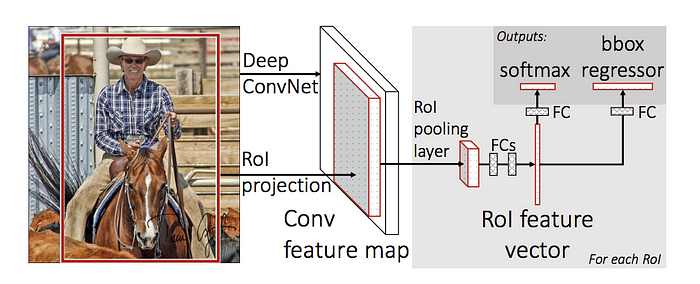
这个模型通过整合区域提议和分类过程进行了改进。与单独处理每个区域提议不同,Fast R-CNN使用单个CNN从整个图像中提取特征,然后应用池化层为每个提议获取特征。这显著加快了过程。
R-CNN与Fast R-CNN
1. 架构和处理步骤
R-CNN:
两阶段方法:R-CNN使用外部算法(如选择性搜索)生成区域提议,然后将其输入模型。这意味着虽然它通过使用共享特征图比R-CNN提高了效率,但仍然依赖于单独的提议生成步骤。
独立特征提取:每个提议区域被裁剪和调整大小为固定尺寸,然后独立通过CNN处理以提取特征。这导致冗余计算,因为CNN多次处理重叠区域。
> 由于每个区域提议的独立处理,R-CNN比Fast R-CNN慢且计算成本更高,特征提取需要大量的内存和时间。
Fast R-CNN:
单阶段方法:Fast R-CNN通过CNN处理整个图像,提取整个图像的特征图。
感兴趣区域(RoI)池化:与单独提取每个区域提议的特征不同,Fast R-CNN使用RoI池化从共享特征图提取每个提议区域的特征。这显著减少了冗余并提高了效率。
> 通过使用共享计算和CNN的端到端联合训练,Fast R-CNN比R-CNN快得多。通过CNN的单次前向传递,可以更快地检测和分类物体。
Faster R-CNN
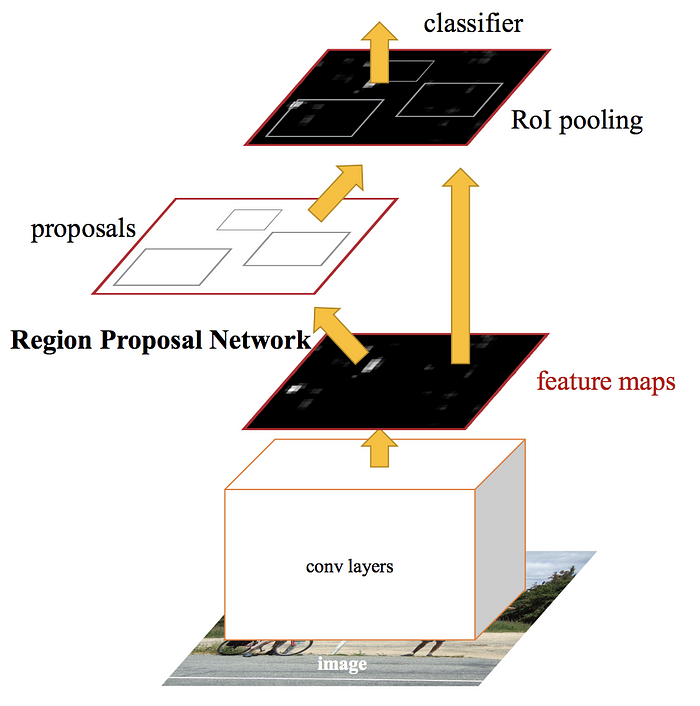
这个模型通过引入与检测网络共享卷积特征的区域提议网络(RPN)进一步优化过程。RPN直接从特征图中生成区域提议,使整个系统更快、更高效。Faster R-CNN在目标检测方面实现了最先进的性能。
1. 架构和提议生成
Fast R-CNN:
区域提议输入:Fast R-CNN依赖外部算法(如选择性搜索)生成区域提议,然后将其输入模型。这意味着虽然它通过使用共享特征图比R-CNN提高了效率,但仍然依赖于单独的提议生成步骤。
RoI池化:Fast R-CNN采用RoI池化从共享特征图提取每个区域提议的特征。
> 由于共享计算,Fast R-CNN比R-CNN快,但仍在单独的提议生成步骤上花费时间。
Faster R-CNN:
集成提议生成:Faster R-CNN引入区域提议网络(RPN),直接从CNN产生的特征图生成区域提议。这种集成允许完全端到端的训练过程。
RPN架构:RPN在特征图上使用滑动窗口,并提出边界框及其物体分数,简化了检测流程。
> 通过消除外部提议生成的需求,端到端联合训练RPN,Faster R-CNN大大加快了检测过程,使其适用于实时应用。
Mask R-CNN
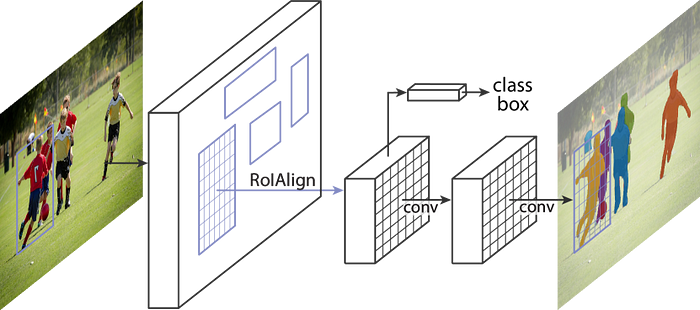
Mask R-CNN在Faster R-CNN的基础上增加了实例分割的能力。
以下是为什么需要它的原因:
实例分割:虽然Faster R-CNN检测物体并提供边界框,但它不能区分同一类别的不同实例。Mask R-CNN通过为每个检测到的物体预测二进制掩码来解决这个问题,允许在图像中精确分割每个实例。
更详细的理解:通过提供像素级分割,Mask R-CNN增强了模型理解复杂场景的能力,其中物体可能重叠或部分遮挡。这在自动驾驶、医学成像和视频分析等应用中特别有用,这些应用需要细粒度的物体定位。
统一框架:Mask R-CNN保持了Faster R-CNN的两阶段检测框架,同时增加了一个分支来预测掩码。这种统一使其能够利用相同的特征提取和区域提议过程,使其在需要检测和分割的任务中既高效又有效。
Mask R-CNN与Faster R-CNN
1. 核心功能
Faster R-CNN:
目标检测:Faster R-CNN主要专注于检测图像内的物体,并提供边界框和类别标签。它集成了一个区域提议网络(RPN)来生成区域提议,并使用这些提议来分类和细化边界框。
Mask R-CNN:
实例分割:Mask R-CNN通过增加实例分割的能力来扩展Faster R-CNN。除了边界框和类别标签外,它还为每个检测到的物体生成二进制掩码,允许在边界框内对物体进行像素级分割。
2. 架构差异
Faster R-CNN:
两阶段网络:架构包括一个主干(通常是CNN)、一个用于生成提议的区域提议网络(RPN)和一个对提议进行分类和细化边界框的检测网络。
Mask R-CNN:
额外分支:Mask R-CNN在Faster R-CNN架构的基础上增加了一个并行分支,为每个检测到的物体预测分割掩码。这是通过一个额外的全卷积网络实现的,该网络处理来自RPN的RoI特征。
3. 输出
Faster R-CNN:
输出:它输出每个检测到的物体的边界框坐标、类别标签和物体分数。
Mask R-CNN:
输出:它输出每个检测到的物体的边界框坐标、类别标签、物体分数以及指示每个物体形状的二进制掩码。
本文转自:小白玩转Python,转载此文目的在于传递更多信息,版权归原作者所有。





