一、无人驾驶架构
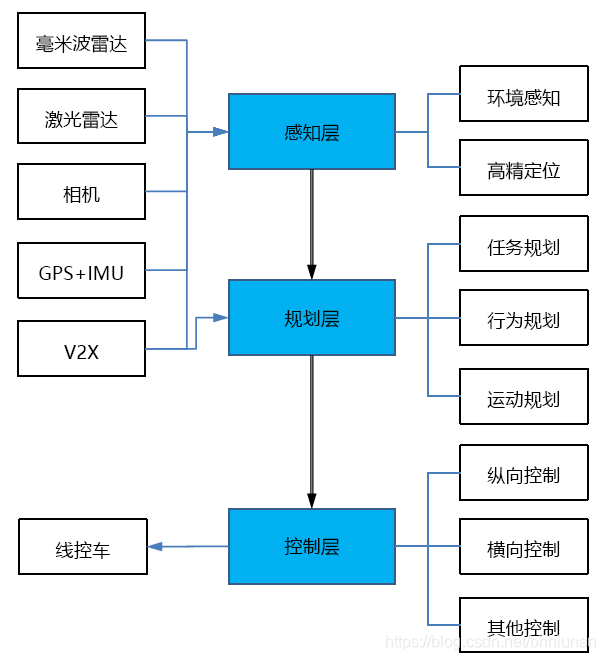
一个系统,架构是比较重要的。架构的好坏直接决定了系统是否稳健、后续是否容易扩展等问题。无人驾驶系统,一般分层的架构。如下图所示,是一个无人驾驶系统的分层架构,整个系统分为感知层、规划层、控制层。
二、感知层
在无人驾驶系统中,算法就相当于是一个人类驾驶员,感知就相当于是人类的眼睛和耳朵,用来感受外部的环境。感知层需要做的工作是环境感知和高精定位。环境感知解决的是本车周围都有什么东西的问题;高精定位解决的是本车在什么位置的问题。这两部分对于无人驾驶车来说都是非常重要的信息。
首先,为了保证无人驾驶车的安全,无人驾驶车要对周围的物体有充分的感知能力。目前,常用的感知传感器有激光雷达、毫米波雷达、相机、V2X等。这些传感器将本车周围的障碍物的类型、位置、大小、速度、运动方向等信息输出,用于后续的本车行为和运动的规划。
激光雷达是无人车使用的非常重要的传感器,它采用激光作为探测介质,通过内部的激光发射器向外部不断发射激光脉冲,遇到物体反射之后,激光雷达对反射的激光脉冲进行接收,计算激光的飞行时间可以计算物体的距离,最终形成3D点云。无人驾驶的感知层通过算方法对原始点云进行离群点滤波、下采样滤波、去地面、聚类、跟踪、特征识别,最终输出障碍物的位置、速度、形状、类型等信息。
毫米波雷达是比较成熟的传感器,以毫米波作为探测介质,对周围的障碍物进行探测,通过雷达内部的处理逻辑对接收到的反射波进行滤波、聚类、跟踪等处理,直接给无人车输出目标的位置、速度、加速度等信息。
相机也是无人驾驶车使用的重要传感器,他可以输出周围环境的图像信息,信息比较丰富。无人驾驶车的感知层采用深度学习或传统算法对周围环境进行识别,可以输出车道线、车辆、行人、信号灯、交通牌等信息。
GPS+IMU的作用是用来定位,GPS模块接收卫星信号,并进行解算,可以计算出无人车的经纬度、航向、速度等信息。通过对GPS进行差分定位可以实现厘米级精度的定位。IMU可以与GPS信号进行融合定位,融合之后信号更加平顺,并可以提高定位信号的输出频率,在丢失GPS信号和差分信号的情况下,还可以实现短时间的高精度定位。
V2X是V2N、V2V、V2I等通讯方式的统称,它也是无人车感知系统的重要组成部分,可以使无人车接收到云平台、其他车辆、路边设备等发送来的信息。
单一的GPS+IMU定位在有些情况下会失效或出异常,这对于无人驾驶车来说是致命的。定位功能让无人车知道自己在哪里,如果这个信息出问题了,会导致无人车出现危险。为了提高无人车的定位可靠性,可以采用轮速计、激光SLAM、视觉SLAM结合高精地图与GPS+IMU进行融合定位,在某个定位传感器出现异常时,依然可以输出可靠的定位信息。
三、规划层
规划层相当于人类驾驶员的大脑,对感知层的信息进行分析计算,得到如何对无人车进行控制的输出。
规划层首先要做的是任务规划,他解决的是沿什么路径行驶的问题,任务规划根据设定的起始点和终点,采用Dijkstra、A*等算法规划出由起点到终点的路径,用于导引无人车行驶。
行为规划的作用是对无人车在智行任务时的各种行为进行规划。行为规划一般采用有限状态机进行规划,状态机把无人车划分成若干状态,每个状态下对应不同的行为,如停车等待状态、正常行驶状态、超出状态状等状态,态机中还包含了不同状态之间切换的条件,如下图所示是有限状态机的一个图示。
运动规划是对行为规划出来的行为的实现过程进行规划,无人车需要规划出一系列的动作,来实现行为规划的结果,比如说在停车等待的状态,运动规划的结果为期望车速为0、转向回正、期望档位为空档、期望驻车制动为启动状态等。
四、控制层
控制层相当于人类驾驶员的手和脚,用来直接控制线控的无人车。他解决的是规划层输出的期望值如何实现的问题。
纵向控制用来控制无人车的车速,他的输入是期望车速、实际车速、以及路面的坡度、车辆的状态等信息,根据计算输出油门踏板和制动踏板的控制量,使无人车的车速能够跟随期望车速。
横向控制用来控制无人车的转向,他根据车辆与期望形式轨迹的偏差来计算方向盘的转向角度,使无人车对期望轨迹进行跟随。
其他控制用来对无人车的档位、驻车制动、车灯、喇叭等部件进行控制,他根据无人车的行为对这些不仅进行控制。
五、总结
无人驾驶的分层结构由来已久,并且一直沿用至今。
版权声明:本文为CSDN博主「fxfreefly」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/bhniunan/article/details/109783518





