作者:杨月钢等
随着科技的发展,自动驾驶汽车已经从概念逐渐变为现实。过去几年,百度、Pony.ai等公司相继快速步入了全球自动驾驶技术研发的前列,可以说自动驾驶技术再次引领了整个汽车技术的突破。
一、自动驾驶汽车级别分类
和人工智能一样,自动驾驶汽车也是一个有歧义、经常被人用不同方式解读的概念。为了更好地区分不同等级的自动驾驶汽车,SAE international(国际汽车工程师协会)将自动驾驶汽车分为L0、L1、L2、L3、L4、L5六个等级。
L0最好理解,属于纯人工驾驶汽车,所有驾驶动作均由驾驶员来完成,汽车只负责执行驾驶员发出的各种操作指令。
L1级是指自动驾驶系统可辅助驾驶员完成某些驾驶任务的半智能化汽车,例如乘用车中配置的自适应巡航、车道保持辅助等功能均属于L1级自动驾驶汽车的范畴。
L2级是指自动驾驶系统能够完成某些驾驶任务,可实现部分自动化,但驾驶员依然需要监控驾驶环境并准备随时接管的智能化汽车。
自动驾驶汽车到了L3级别,车辆能够实现独立操作驾驶,驾驶员无需将双脚和双手放在制动踏板和方向盘上。考虑到行车的安全性,驾驶员还需集中注意力,随时准备接管车辆,以便应对各类自动驾驶系统无法解决的问题。
自动驾驶汽车到了L4和L5级别,已经完全实现了自动驾驶,这两个级别的汽车可实现由机器独立完成全部的驾驶操作,无需驾驶员介入,驾驶员可将注意力放在其他事情上、休息或者工作均可。但两者在适用范围上有一定的区别,L4级别的自动驾驶汽车需要特定的场景,特定的路线,而L5级则适应于任何场景,是真正意义上的自动驾驶。
二、整车设计方案
2.1 整车设计目标
2.1.1 车辆等级
设计符合L4等级标准的高度自动化的纯电动客车,在特定驾驶模式下,由自动驾驶系统完成所有动态驾驶任务。
2.1.2主要功能
①自动循迹驾驶,根据设定的轨迹或系统生成路径完成相应的自动驾驶任务。
②车道保持,在当前车道内自动行驶,同时和前后车保持安全距离。
③跟车行驶,自动跟随前车行驶并保持安全距离。
④精准停车,车辆能够根据指令在目标地点停车,停车精度达到厘米级。
⑤障碍物检测跟踪及响应,对车辆四周的行人、非机动车、机动车进行准确检测和跟踪。根据障碍物状态,作出合理的行为响应,包括紧急停车、停车等待、跟随行驶等。
⑥车道线识别及响应,根据车道线状态和行驶任务作出合理响应,包括车道保持、换道行驶等。
⑦紧急制动,车辆能够根据周围环境自主判断,遇到紧急状况能够自主刹停;能够接收estop或车内驾驶员等工作人员紧急刹车指令并刹停。
⑧双驾双控,驾驶员随时能够通过方向盘或刹车接管车辆操作并继续人工驾驶;可通过指令恢复车辆自动驾驶。
⑨信息通讯,车载通讯设备支持与相关道路端通信,通过道路端设备获取相关道路信息(如红绿灯)辅助驾驶;支持车队不同车辆间信息通讯。
⑩自动开关门:车辆到达指定的位置后自动开启车门,同时根据车门周围环境信息,完成自动关门动作。
2.2 传统部件的选型布置
整车采用全承载低入口结构,车辆驱动型式4×2,后置后驱动,前2后4空气悬架,整车长度10500mm,为加大整车站立面积,增加载客人数,整车采用长轴距,短前悬布置。整车高压系统布置在车辆后舱内,有利于整车轴核分配,同时减少整车管线长度。
整车骨架主要承载断面采用金刚封闭环结构,力流传递连续,抗扭能力强。采用刚性前轴结构,包括完整车桥系统、空气悬架系统、减震器和盘式制动器。车架采用模块化设计,分前端车架、中段车架、驱动桥处车架、后段桁架4个模块,有效减少部件种类和数量,缩短设计周期,提高产品可靠性,降低成本。
采用国内知名品牌永磁同步电机,扭矩大,效率高。高压电池采用先进的液冷方案,8年容量衰减不超过20%,防护等级IP68,适应各种恶劣环境(雨水、泥土等)。采用具有自主知识产权的整车控制器,通过多维度节能控制技术,实现了车辆各高压部件的高效协同,细化控制算法使车辆以最低的能量消耗满足不同工况下的功能及性能需求。同时为实现自动转向、制动等功能,车辆还配有EPS和EBS。与传统的纯电动客车相比,除基本的三电系统外,还增加了自动驾驶系统和安全控制系统。
2.3 自动驾驶系统的选型布置
2.3.1 自动驾驶系统组成
自动驾驶系统包括激光雷达、毫米波雷达、高清摄像头、计算单元、组合导航及V2X设备等,各部件之间的关系如图1所示。
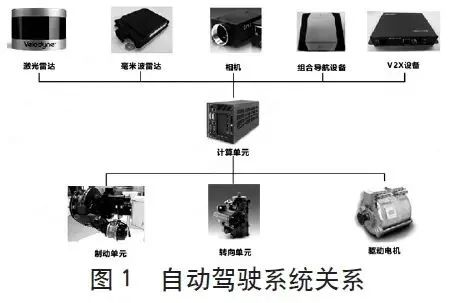
激光雷达用于感知车辆周围的障碍物,毫米波雷达用于探测远距离障碍物,高清摄像头用于检测前方车道线,他们好比汽车的眼睛用于观察周围的环境,同时将信息传输给计算单元;计算单元就是汽车的大脑,将各个传感器传输来的信息数据进行处理并发出各种指令(制动、转向等),确保车辆完成自动驾驶操作。组合导航及V2X设备用于车辆的定位及信息交互。
2.3.2 自动驾驶系统选型布置
选用进口16线激光雷达,布置在车辆前方,充当车辆的眼睛,左右各一个;车辆前部中间位置布置一个毫米波雷达(前方无遮挡),安全冗余设计,在摄像头失效或者摄像头工作受限时,依旧可以由毫米波雷达进行一定程度的检测工作,保证车辆的安全;高清摄像头布置于前风挡驾驶员右前方,用于检测前方车道线;V2X布置于前顶风道内用于车辆与红绿灯信号、行人、车辆等的交互;工控机、惯导等部件作为整车的控制中心,布置于车内前桥上智能设备箱内;同时车辆前后桥正上方各布置一个惯导天线,用于车辆的导航定位。自动驾驶系统部件分布于整车的各个位置,为车辆提供精确的360度全景视野。
自动驾驶系统感应范围如图2所示。
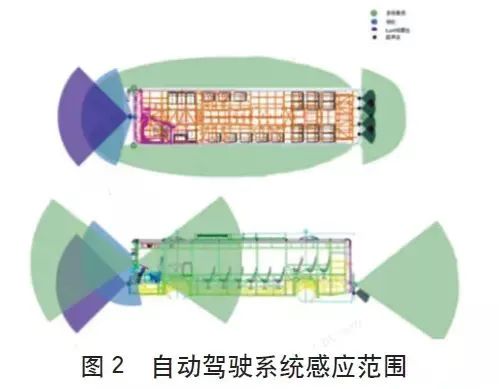
通过自动驾驶系统车辆可完成自动路径规划、自动道路环境感知、自动驾驶决策、自动高精度地图定位、自动到站停车及车辆故障紧急停车等功能。
2.4 安全控制系统
汽车行驶安全是人们关注的焦点,自动驾驶也不例外。自动驾驶有利于建立更高效的道路交通体系,通过有效控制人为因素导致的交通事故,提升道路交通安全。为保证车辆行驶安全,整车进行安全冗余设计,在夜间、大雾、雨雪等各种复杂情况下,可保持良好的工作状态,确保24h全天候安全运行。该车具备人工操作和自动驾驶两种模式,且在任何情况下都能将车辆瞬时转换为人工操作模式。
其次,车辆还配备车载烟雾报警系统和易燃易挥发物质检测系统,此系统与整车控制器联动,当烟雾探测器检测到车厢内有烟雾或易燃易挥发物质检测检测到有易燃易挥发物质时,车辆报警同时系统将此信息传输到整车控制器,整车控制器与计算单元进行信息交互,计算单元发送靠边停车指令,使车辆实现靠边停车并打开车门。
第三,该车还配备紧急停车按钮,当车厢内人员发生紧急情况,如:突发疾病、肢体冲突等,车内人员可按下紧急按钮,向仪表发送指令,仪表接收到该指令后作出动作,使整车控制器结合驾驶脑共同控制车辆实现靠边停车并打开车门。
最后,整车控制系统对车辆各主要部件进行实时监测,根据故障情况进行声光提示及内部分级处理,即使车辆出现不可运行故障,转向系统及制动系统仍能正常工作,为驾乘人员提供最基本的安全保障。对转向系统进行冗余设计,增加了独立于高压系统的转向系统,当车辆出现高压故障时,冗余系统即时生效,保证车辆转向系统的正常运行。
三、结束语
自动驾驶客车技术的发展兼顾智能化、网联化两种路径,“智能化+网联化”融合发展,以系统最终替代人类实现全部驾驶任务为终极目标。自动驾驶客车代表了客车未来发展的重点和方向,随着相关技术的成熟,自动驾驶客车的商业化指日可待。
来源:中国重汽集团汽车研究总院





