作者 | Aimee
出品 | 焉知
当前汽车智能化应用大部分能与之关联的是智能驾驶。实际上,真正的智能化有三大发展方向:驾驶自动化、座舱智能化、网联智能化。要实现真正的无人驾驶汽车,既需要在智能网联的帮助下,将人从动态驾驶任务中释放出来,又需要促成座舱数字化、信息化、多功能化。即从自动驾驶到无人驾驶阶段,娱乐域内部的ECU需要完成融合,将与自动驾驶域进行高速通信。智能座舱将完成对外部环境的可视化、完成对驾驶舱内人员的状态、情绪的感知。同时,车载人机交互系统逐步整合,组成“电子座舱域”,并形成系统分层。
如上三个功能都是无人驾驶重点落地功能。实际上,真正的无人驾驶体验感并不仅仅在于其驾驶本身,而是更多的倾注于对驾驶自动化实现之后的座舱智能化。数字座舱相对智能驾驶最大的不同在于:前者重点在于人机交互和信息服务体验,安全风险较小;后者要控制车辆行驶,责任重大,落地难度也成倍增加。在新E/E架构帮助下,座舱域ADAS/AD最终会整合在一起,真正实现车辆的智能化控制。这个过程的意思是自动驾驶所实现的目标是完全解析驾驶员意图,实现集通勤、办公、休闲、娱乐于一体的“移动办公休息室”。届时,自动驾驶过程将不再加持下各种传统汽车驾驶设备(方向盘、刹车、油门、甚至仪表也完全做到虚拟化),这时设备可以完全做到智能化折叠,并支持移动座椅的随意布局,为乘员提供更舒适更灵活的空间提供保障。
整个驾驶座舱域的发展主要分为如下四个阶段:
① 本地娱乐导航阶段
这阶段主要是原始的车机交互系统,各交互单元独立运行。
② 智能网联车机阶段
分散的边缘计算开始集中化趋势,部分零部件企业形成座舱域控制器量产方案。
③ 自动驾驶座舱阶段
智能座舱域智能驾驶域开始融合、单颗AI芯片实现车外、车内、融合等边缘侧计算,“独立感知层”形成。车内操作系统建立了中间级生态。
④ 无人驾驶座舱阶段
车载中央计算机的形成,计算芯片会出现整合趋势,车内操作系统建立应用级生态。

当自动驾驶发展的无人驾驶阶段时,智能座舱也进入到了无人驾驶的阶段。无人驾驶阶段,人与车之间关于驾驶的交互消失了,汽车本身成为服务的载体,车与路、车与车之间的关系已经不再影响人与车之间的关系。无人驾驶座舱的设计将从以驾驶员为核心转向以乘客为核心产品设计思路。高度智能可交互的虚拟形象将是该阶段的核心。
为满足智能座舱未来的多功能、多任务需求,需要对当前座舱域进行大刀阔斧的升级,主要涉及一体化系统解决方案,包括座舱域多重感知,决策控制系统,座舱域执行端,以及AR-HUD端口。其中在座舱布局中,充分强调舱内感知系统、摄像头及生物识别等。同时座舱呈现手段上充分使用了氛围灯、流媒体后视镜、增强现实、抬头显示等手段。这就要求信息娱乐系统集成化、数字化、显示AR化,当智能驾驶达到一定程度时,就可以充分实现座椅/方向盘/中控台等座舱设施的电子化、可折叠化(隐藏化)、移动布局化。
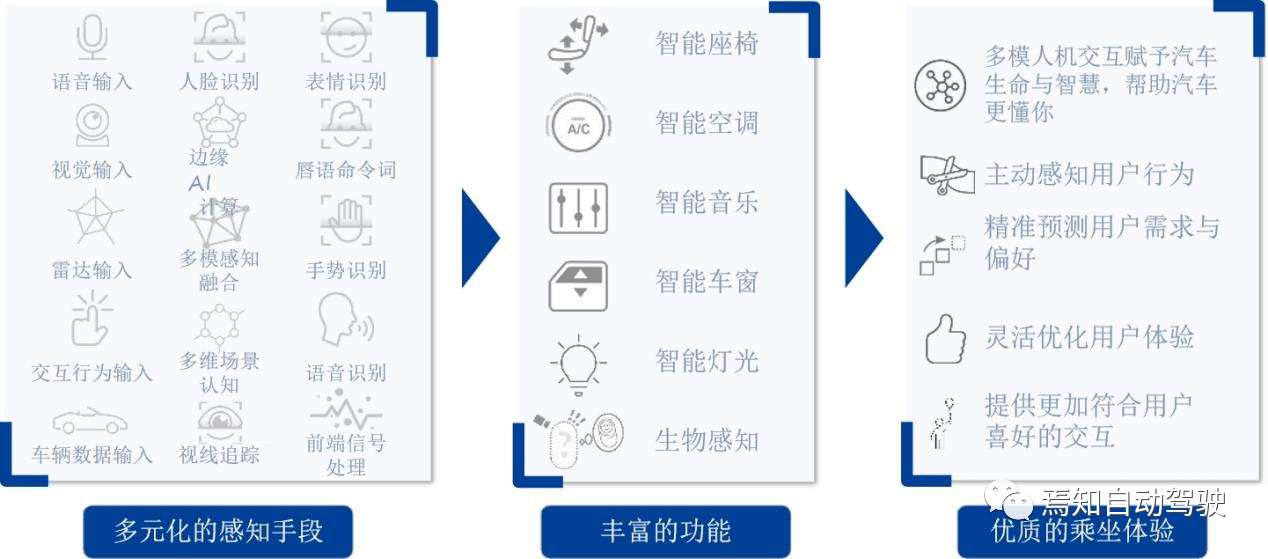
智能座舱感知能力
与智能驾驶类似,智能座舱的整体能力仍旧包含感知、呈现、处理能力。其中,感知系统主要包含舱内摄像头、生物检测手段;呈现能力主要包含氛围灯、流媒体后视镜、增强现实抬头显示以及智能座椅等;处理能力主要涉及座舱域控制器(或分子域控制器)。
下面将分别详细介绍智能座舱这几大类功能,并针对部分主要功能分析其在智能驾驶中的应用设计方案。
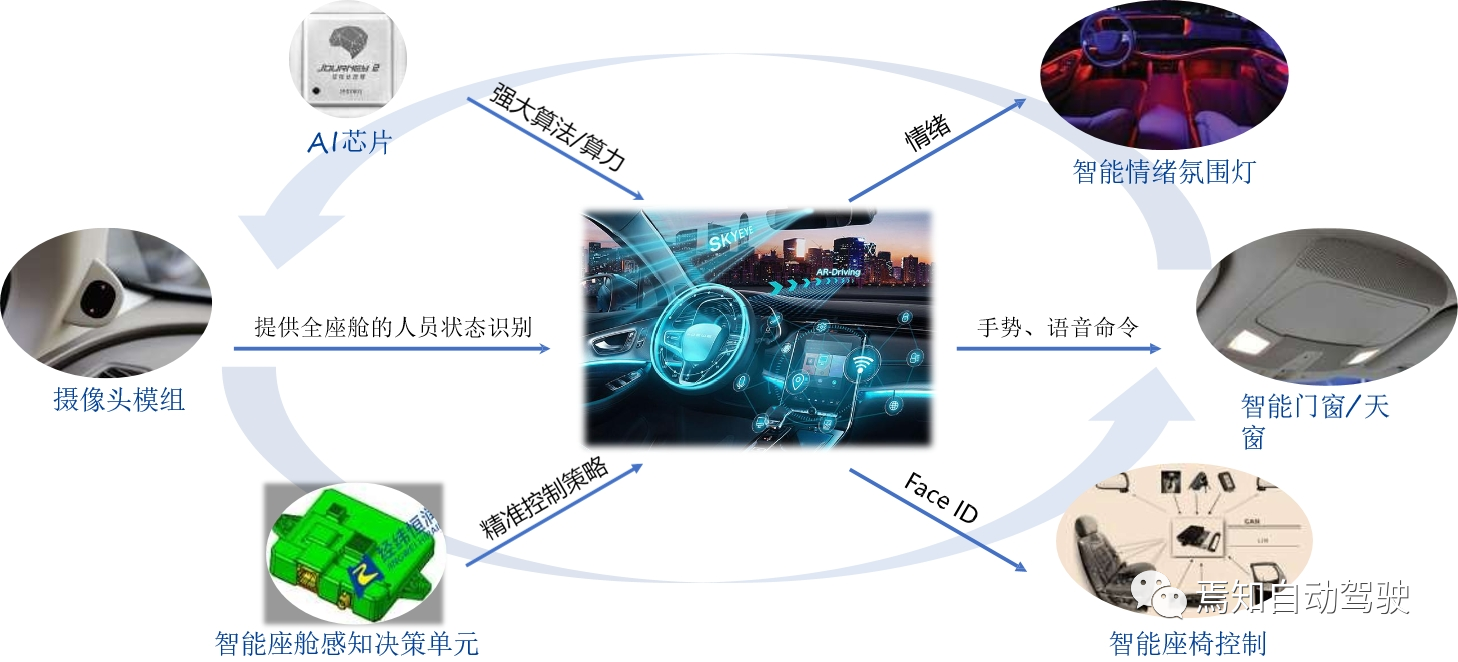
智能座舱系统通过独立感知层的形成,使得车辆具备了“感知”人、“理解”人的能力。这种独立感知层,能够拿到足够的感知数据,例如车内视觉(光学)、语音(声学)以及方向盘、刹车踏板、油门踏板、档位、安全带等底盘和车身数据,利用生物识别技术(车舱内主要是人脸识别、声音识别),来综合判断驾驶员(或其他乘员)的生理状态(人像、脸部特征等)和行为状态(驾驶行 为、声音、肢体行为),做到车来充分“理解”人。同时,计算资源集中化也会在边缘侧的感知计算中发生,即由单颗强力AI感知芯片负责车外视觉、车内视觉、语音识别等,同时需要AI加速的感知任务。这种硬件层的变化,最终将促使系统软件层的“独立感知层”的形成。
成熟的智能座舱感知能力主要体现在完善的高性能摄像头模组,用于舱内视觉感知监控(一般指驾驶员状态监控系统),其次,利用高性能的毫米波雷达生物占位检测,辅助摄像头进行相应的驾驶员或乘员存在性检测。
L3自动驾驶有可行驶区域(ODD) 限制和驾驶员接管要求。倘若驾驶员处于疲劳或注意力分散状态,难以实现有效接管汽车,则需要车内感知能力来掌握驾驶员的状态。因此,汽车需要车内感知能力来掌握驾驶员的状态。实现了车内视觉、语音感知的智能座舱系统, 能够有效检测驾驶员状态,助力自动驾驶系统的决策准确性和安全性。
真正高性能的感知交互还可以根据具体场景,推送交互请求,如提供咨询信息,提供车辆状态信息,提供“车对人”的主动交互,降低驾驶员在驾驶过程中的交互负担,改善交互体验等。

对于智能座舱域摄像头开发能力而言,相应的开发需求能力主要体现在如下几方面:
1. 成熟的摄像头模组开发经验以及控制系统集成能力;
2. 专业的整车布置支持能力;
3. 拥有完整的AA组装、标定以及EOL生产制造工艺流程。
此外,利用舱内高分辨率、高性能雷达组成的生物识别技术应用,催生驾驶员监控系统迭代,可以有效的增强车辆感知能力。
同时,语音控制和手势控制技术突破,基于多种模式感知手段的融合,使感知更精准、主动性更强。车内视觉感知能够有效支持座舱多样功能的技术实现,实现个性化的车内体验车内视觉感知,同样能够有效助力自动驾驶功能的实现,保障决策的准确性。
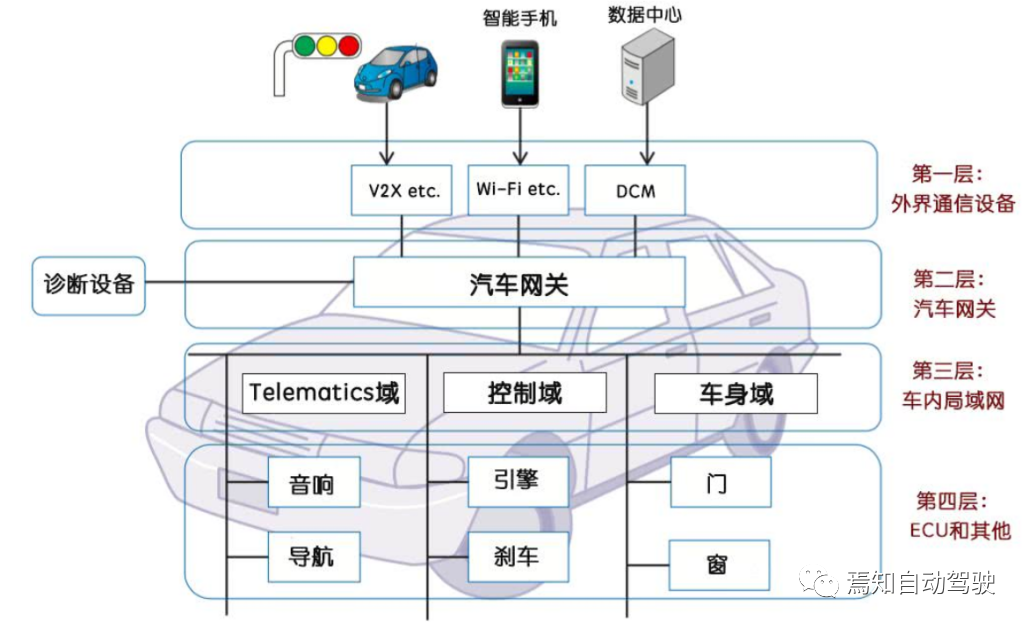
智能座舱的系统架构
目前智能座舱系统的呈现能力主要是以两个控制域来进行分割的,其一是紧绑定于智能驾驶系统的信息安全域,其次是绑定于智能交互端的娱乐信息域。两个域的相互关系如下图:
智能驾驶系统与智能座舱系统是分为两个独立的信息处理单元分别进行信息处理的。其中,智能驾驶系统需要高效利用智能座舱域,诸如仪表、AR-HUD显示单元进行有效的驾驶信息显示,同时也需要利用中控屏进行有效的驾驶控制、设置和交互提示等。升级版智能座舱域控制通过多媒体集中计算单元(简称座舱域控)需要接入云服务平台、移动通信及以太网关单元、功放及无线单元,并设置驾驶员交互显示单元:即中控多媒体显示、驾驶员监控显示、乘员监控等。

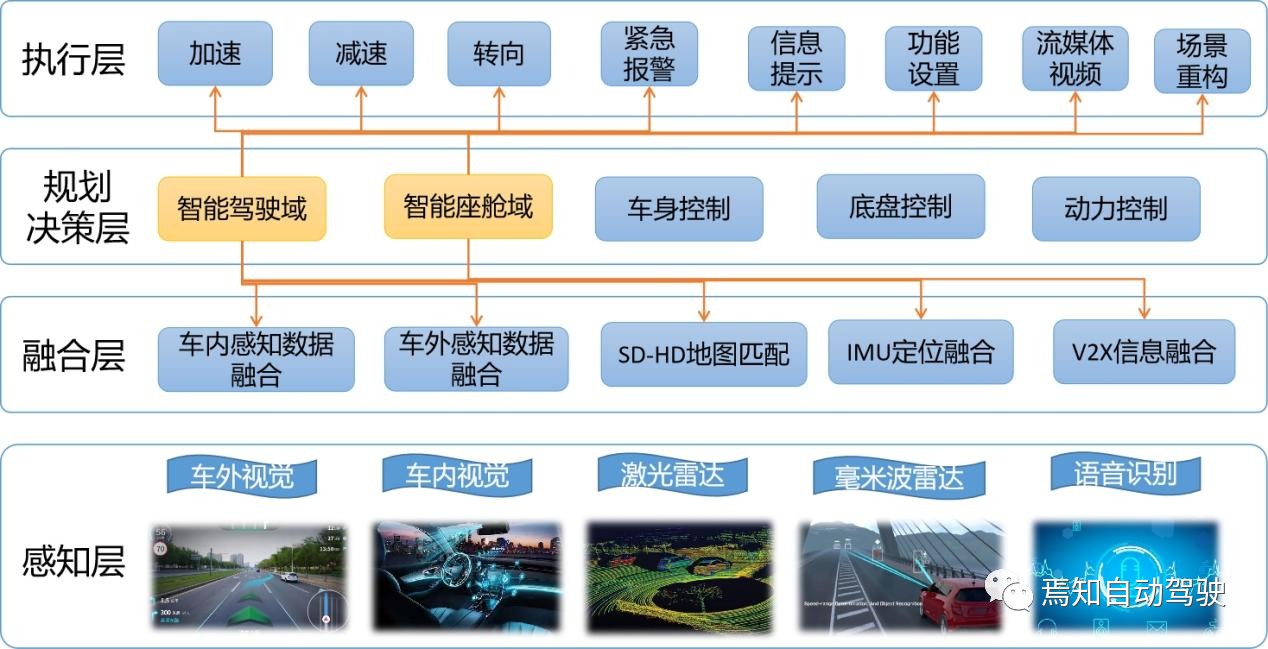
智能座舱域的整套系统架构与智能驾驶域类似,且两者存在一定的复用性,比如,智能驾驶域的感知结果可能作为智能座舱域的感知输入数据进行复用。一般情况,座舱域更加偏向于视频信息显示,而智能驾驶域则偏向于环境语义识别及处理。因此如果感知端原始输入在智能驾驶域控制器进行信息处理,则需要驾驶域能够增加有效的编解串器,同时搭载一定的图像渲染处理器如GPU,将原始视频编解码信息处理后输入至中央处理单元。
电子控制单元(ECU)向域控制器 (DCU)的电子架构过度中,车载影音娱乐底层硬件的计算能力快速增强,得以支持一芯多屏。自动驾驶辅助系统(ADAS)的丰富功能增加了驾驶员处理信息的难度,在面临即时性信息处理的需求下,更加需要智能交互与显示。AI引擎逐步成熟,大幅提升了智能化体验。
分散的座舱域ECUs难以与安全域(ADAS/AD)控制器协同工作,无法实时地将GPS、Radar、Lidar和摄像头的实时环境信息展示给用户。因此,座舱域控制平台通过将座舱域多个ECU集成到一个控制器上,整合IVI、HUD、驾驶信息、多功能信息显示以及ADAS和车联网的信息资源,形成高度集成的硬件平台,可以有效降低了整车成本,优化车内空间,减小功耗,也可整合操作系统,实现软硬件分离,开启“软件定义汽车”第一步。
后续发展趋势看来,座舱域、动力域、底盘域会形成多域融合,促进新车载交互技术的发展,座舱域控制器会同步参与智能驾驶域、动力域、底盘域的控制,比如通过语音控制给车辆智能驾驶这种安全性有高要求的操作提供支持。随着自动驾驶系统对动力域、底盘域的 不断整合,以及面向服务架构(SOA)在车辆的普及,复杂的驾驶行为可能会抽象成一个一个驾驶服务。这样座舱域控制器通过提高自身的功能安全等级后,就可以直接调用自动驾驶域的驾驶服务,进行车辆的驾驶控制,形成人机共驾的新局面。经过对座舱域系统的系统架构和软硬件进行安全升级后,智能汽车的架构将升级为以整车为基础,以驾驶服务为目标所设置的服务型系统及软硬件架构。
智能座舱系统呈现能力
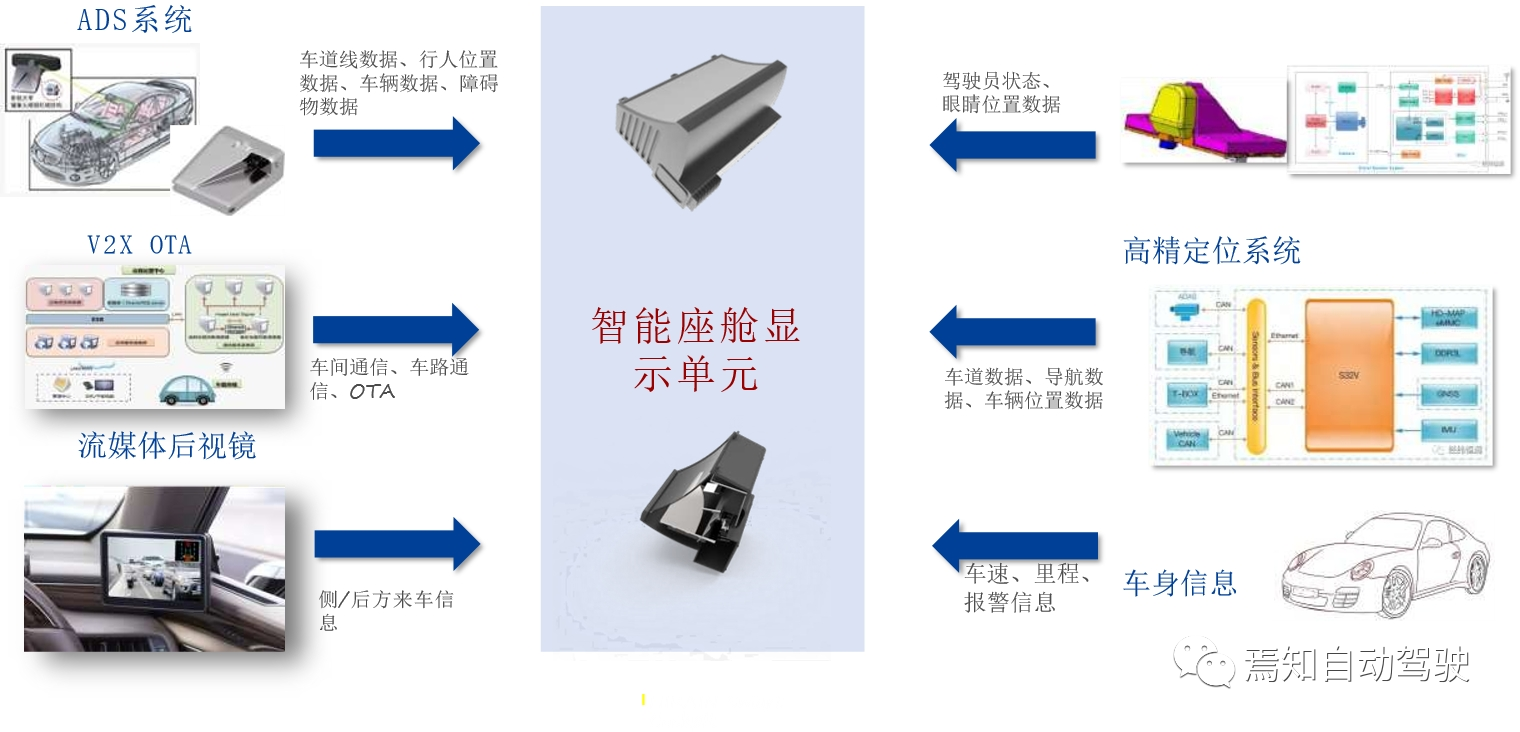
一般的,智能座舱域的呈现能力主要包含仪表盘、中控显示器、智能AR-HUD系统,通过融合T-Box、DMS系统、ADAS系统、高精定位系统以及未来的V2X,可以很好的将智能座舱在自动驾驶中的优势体现得淋漓尽致。如智能座舱系统将导航信息输入至智能驾驶系统域控制器并通过其进行SD-HD Map匹配,可以很好的实现基于车道高精度级别的导航定位系统任务。
智能座舱可以升级氛围灯,并基于传统LED的单色、多色方案进行。其功能包括支持单通道4000+颗RGB,更小的LED封装便于灵活布置,大规模LED部署,功能、效果设计空间极高,新交互性功能——动态音乐随动、情绪识别融合等。
智能座舱在流媒体后视镜上也在持续迭代更新,作为盲区示意、碰撞提醒、变道预警、透雨透雾、夜视增强等多个方向的不断升级。通过功能扩展与融合,流媒体后视镜可以与行车记录仪、ADAS系统、流媒体侧后视镜、倒车影像、座舱监控系统等结合起来共同智能驾驶域提供相应的服务。
此外,智能座舱系统还可以在智能座椅上提升舒适度,比如精准、快捷、方便的实现座椅及后视镜调节;具备记忆功能,快捷方便的获取舒适的驾乘车位置;座椅通风加热功能可以提高驾乘舒适程度;迎宾和后视镜自动下倾功能,可以提升整车品质。
总结
智能座舱的技术相当于智能驾驶技术实现难度低、成果易感知,有助于迅速提升产品差异化竞争力,自动驾驶为驾驶员带来了双手双脚解放,这就需要座舱功能从交互、环境、控制、空间、数据五大维度进行智能化变革,提升体验。
如果无人驾驶真的实现了(L5,取消方向盘和踏板;区分L0-L2的ADAS和L3-L4的AD自动驾驶),智能“座舱”的概念也就不复存在了。因为无人驾驶汽车的实体概念应该已经退化成为了一个“移动底盘”。智能“座舱”的概念会真正转化为“移动休息室”。随着技术逐步的成熟,可能会导致硬件架构的进一步集中,加速促成驾驶域与座舱域的融合,并最终形成车载中央计算机。
本文转自:焉知自动驾驶 ,作者:Aimee,转载此文目的在于传递更多信息,版权归原作者所有。如不支持转载,请联系小编demi@eetrend.com删除。





