作者 | Aimee
出品 | 焉知,参考了希迪智驾"V2X+智慧高速"方案
1、L4级为什么需要路侧配合?
在实现自动驾驶的过程中,对于车端感知的自动驾驶其由于感知范围有限,感知性能上由于传感器自身存在的限制,可能导致感知性能暂时性降低甚至失效,仅靠单车的智能,很多典型的驾驶场景是无法满足安全驾驶需求的,这也是当前主机厂开发自动驾驶系统的痛点。
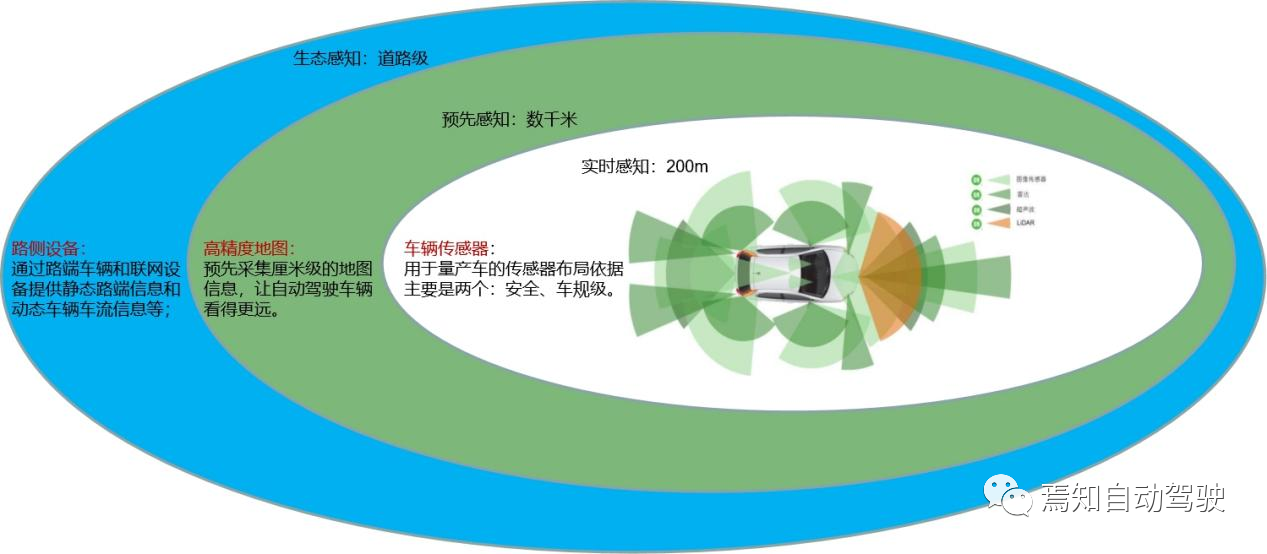
这就使得路端信息的加入是一个必需的过程。通过对部分主机厂已经量产的自动驾驶产品统计分析看出,L4在其限定的运行范围ODD内需要运行稳定安全,更多是需要路端软件配合车端软件进行优化。主机厂希望通过构建智慧的路以弥补车端感知缺陷,从而达到提高自动驾驶性能,降低成本的目的。
2、L4级路侧如何配合车侧?
L4级自动驾驶路侧应用原理是利用智慧道路上的传感器感知、边缘云计算、V2X/5G通讯等车路协同能力,参与自动驾驶车辆的行驶控制。车路协同主要涉及车端、路侧端和云端三个端口,通过统筹车、路、人以及实时交通的动态信息,从而实现信息的互联互通。
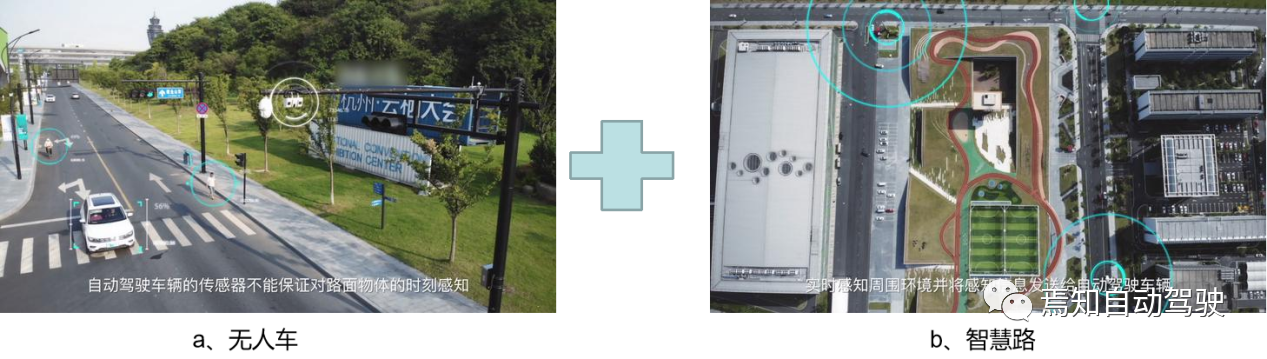
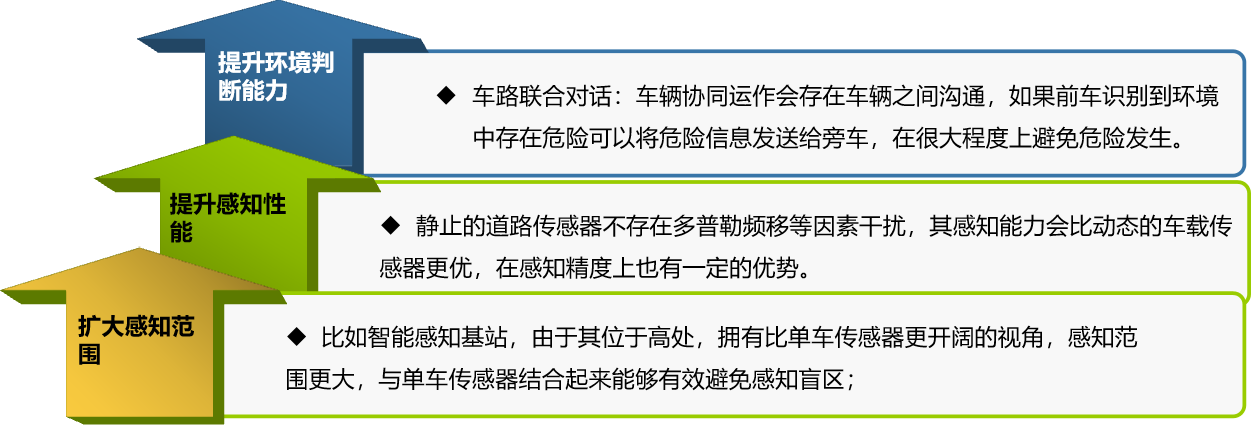
自动驾驶汽车涉及人和车、车和车、车和路之间的默契配合。考虑道路智能化,把智能设备安置在道路上,通过通信网络,感知到的数据可以共享给周边更多车辆,这样将使自动驾驶更好的运作在定义的设计环境中,减少碰撞等危险因素。
3、L4路侧当前主要有哪些技术痛点?
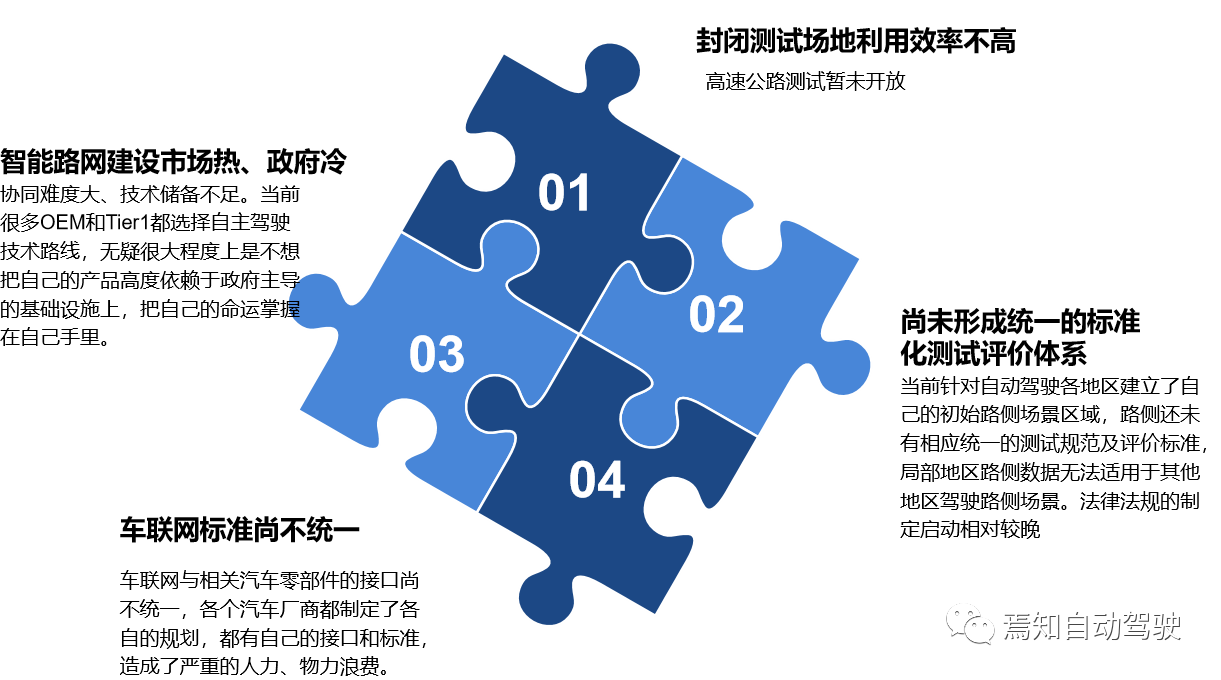
对于高度自动驾驶来说,要求系统所能具备的控制能力实现指数级增长,且在很多不同的环境中均能够接替人进行有效的处理和控制。这就需要路侧端有效的配合车侧进行环境信息的有效检测。然而,需求路侧端的输入情况并不像想象中那么容易,它受制于如下四个方面的制约。
4、L4路侧技术需求路线
对于L4级自动驾驶来说要想实现进一步的自动驾驶控制任务,需要从如下几个方面进行努力:
①加快5G网络布局,构建路侧设备全息感知高速环境;
②与车内通信设备和云控中心形成V2X系统,助力推进基于车路协同的智能网联汽车试验与应用示范;
③需求政府牵头主机厂打造宽松适宜的自动驾驶政策环境,并对路侧建设适当给予一定的政策扶持,加快测试基地建设和推行测试准入互认。

5、L4级路侧如何保证安全?
鉴于感知盲区、肉眼视距限制等原因,高速干道的汇入汇出、隧道进出口无论对于普通车辆还是自动驾驶车辆来说,都是交通事故高发地段,同时该区域的交通状况直接影响着高速通车效率。L4级路侧系统对以上关键节点进行实时态势感知、拥堵预测、应急事件检测,能够有效解决自动驾驶测试道路安全及交通效率问题,同时也提升了交通监测与管理能力。路侧端通过在不同类型的路段布置相应场景,不但能够保证车辆安全通行的需求,同时还能够满足智能网联车辆的测试需求。
整个智慧路端部署场景如下表所示:

为了更好地说明路侧单元如何能够保证自动驾驶的安全性,我们列举当前L3级自动驾驶存在的一系列问题及如何有效的利用路端感知能力解决该类问题的方案策略。
实例1:隧道入口路端安全策略
原理说明:车辆驶进隧道前,因视野中隧道洞口亮度低造成“黑洞效应”,隧道口内形成盲区。路端感知系统是通过在隧道入口处安装感知设备,感知隧道口附近障碍物、异常车辆等,提高行车的安全性,提前将异常信息通过V2X发送给接近车辆,从而达到超视距感知的能力。
路端安全策略:鉴于隧道入口的特点,此处的路端感知系统能力建设可通过在隧洞前一定距离(通常为5-10m)处以壁挂方式设置感知终端。观测主体为隧道内部一定距离(通常为超视距盲区的100m)的实时路况,用以消除黑洞效应对驾驶员或自动驾驶车辆摄像头所造成的不利影响。同时,设置一个摄像头对隧道外部100m内的异常驾驶车辆或异常闯入的施工人员进行实时捕获,用以保障驾驶安全。
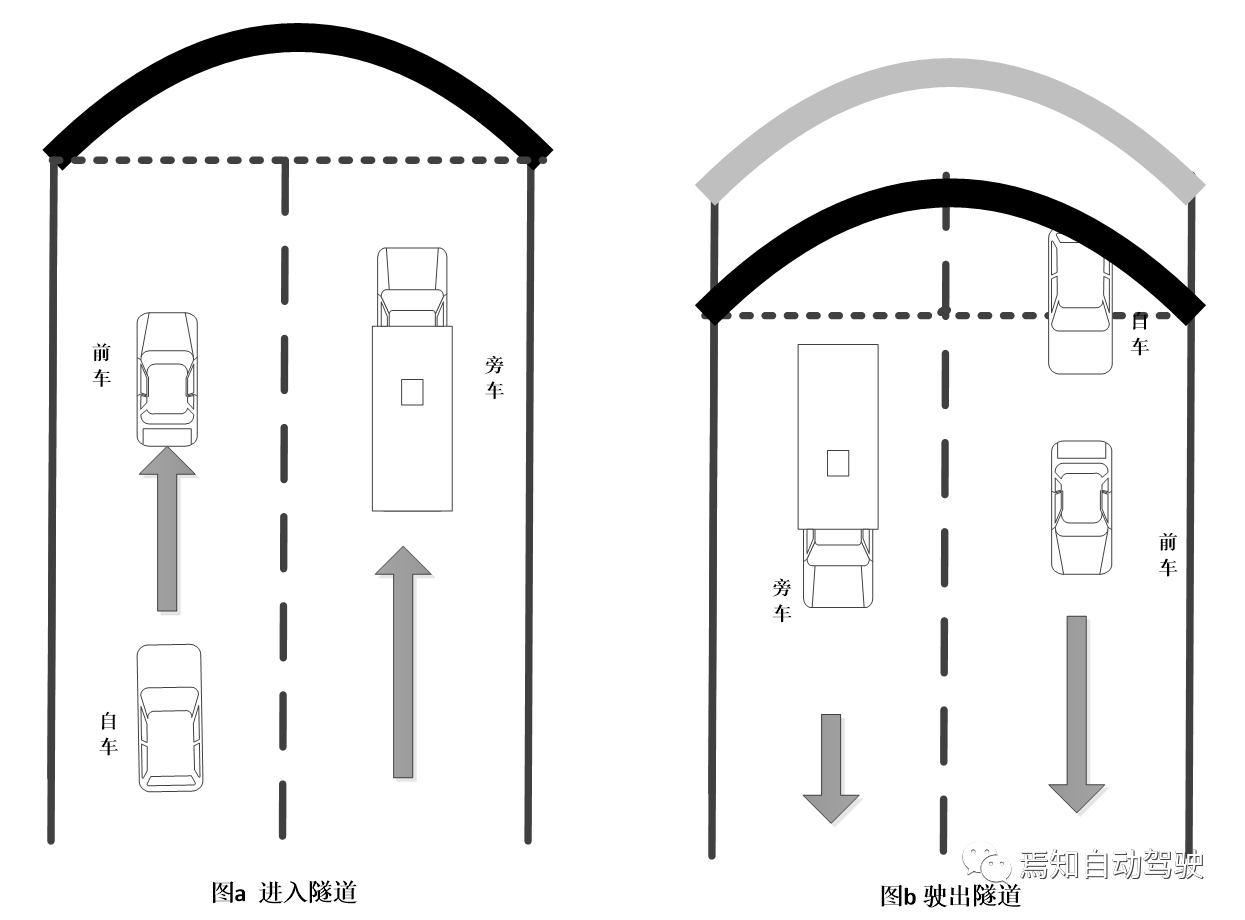
实例2:隧道出口路端安全策略
原理说明:当车辆驶出隧道时,由暗处到达亮处形成白洞效应,隧道外对驾驶员形成盲区。通过在隧道出口处安装路端感知设置,感知隧道出口外的环境,将异常情况通过V2X发送给接近隧道出口的其他车辆,提高行车安全。
路端安全策略:与隧道入口类似,将在隧洞外侧一定距离处设置宽视角摄像头感知设备,观测隧道外部该距离的所有范围内较近距离的实时路况,同时也设置了另一个窄视角摄像头对隧道外部较远距离内的特殊工况(如锥桶、三角警示牌等)进行检测,用以增大传感器的感知能力。
实例3、交叉汇入路端安全策略
原理说明:高速公路匝道或交叉路口汇入口车流量大,行车视距小,车辆从匝道或交叉路口汇入时,往往因为存在较大的单车感知盲区,而无法提前感知易导致变道发生碰撞。路侧单元可以通过在高速汇入区域部署高速汇流车辆的全面检测设备,提前发送相关车辆信息,实现通行辅助等功能。这一过程可减少车辆碰撞事故,有效地保证在高速汇入处的行车安全。
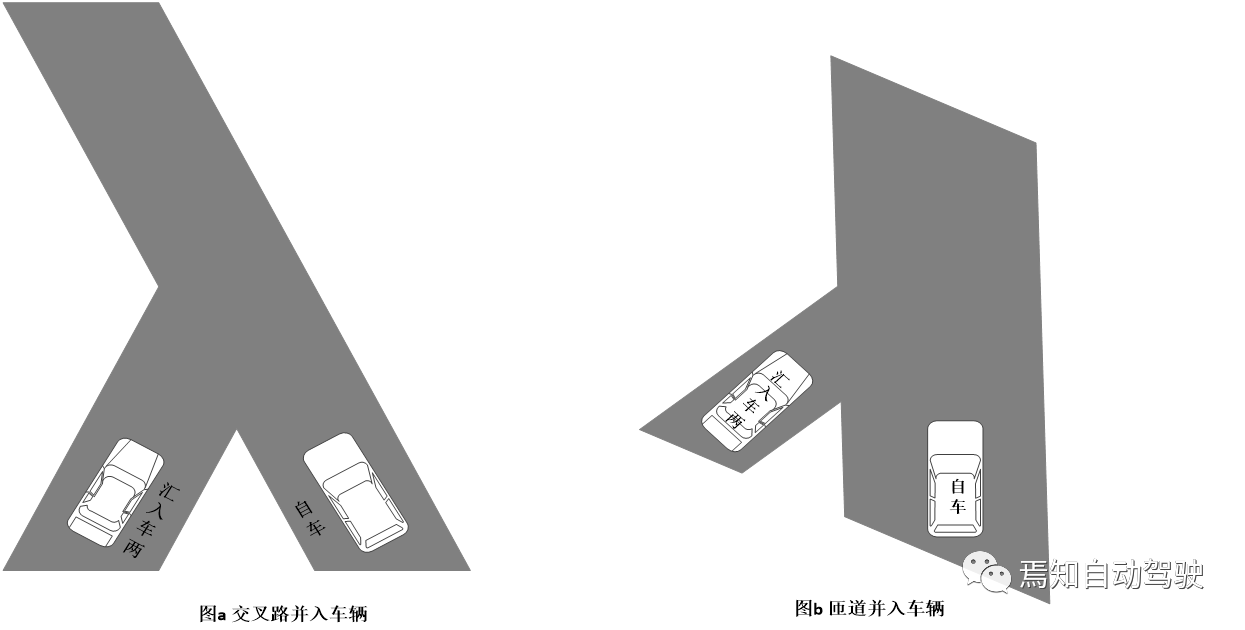
路端安全策略:在每个汇入区域部署两个节点感知到可能对其在主道行驶时产生威胁的车辆位置、方向和速度信息。每个节点部署一套路侧感知系统,其关键观测区域为车辆合流关键区域,在每个感知设备的边缘系统中,将对路测单元自带的摄像头和毫米波雷达进行高精度的数据融合,同时针对于网联车自带GPS定位的情况,也做了特殊处理,使得路侧融合体系更为完善,并通过各个发送接收单元将感知信息实时进行发布。
实例4、匝道汇出
原理说明:高速公路匝道出口存在大量车辆连续变道等危险驾驶行为,车辆在匝道口导流线区域突然减速、停车等情况,这将导致交通拥堵,该区域对于自动驾驶存在巨大的安全隐患。
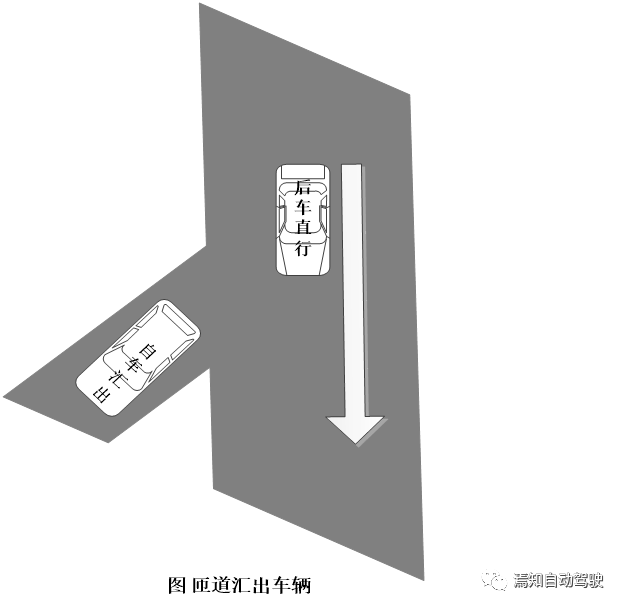
路端安全策略:安装路侧单元可通过在匝道汇出口部署路侧全息感知系统,能实时检测车辆的速度、位置等信息。同时,导流线区域异常停车、紧急变道等事件,提前将异常情况或超视距信息通过V2X发送给接近车辆。汇出节点主要监测区域为汇出点前一定距离(一般为100m左右)及汇出点后一定距离(一般为50m),道路前侧路侧设备需要安装在汇出点视野最为开阔处,通过安装单纯的摄像头,也可补充安装毫米波雷达等设备,并将两者数据进行融合,能够对前述行为进行实时捕获,一方面通过I2V实现对后侧车辆的提醒,同时也可以通过I2N对车辆违法行为进行及时上报和抓拍等处理。
6、L4级路端软件架构
L4级自动驾驶系统的开发的软件架构中不仅包含常规的车端软件,也包含后续新一代的路端软件。路端软件实际是指包含路端感知体系、云端信息调度以及边缘计算平台三个大模块。
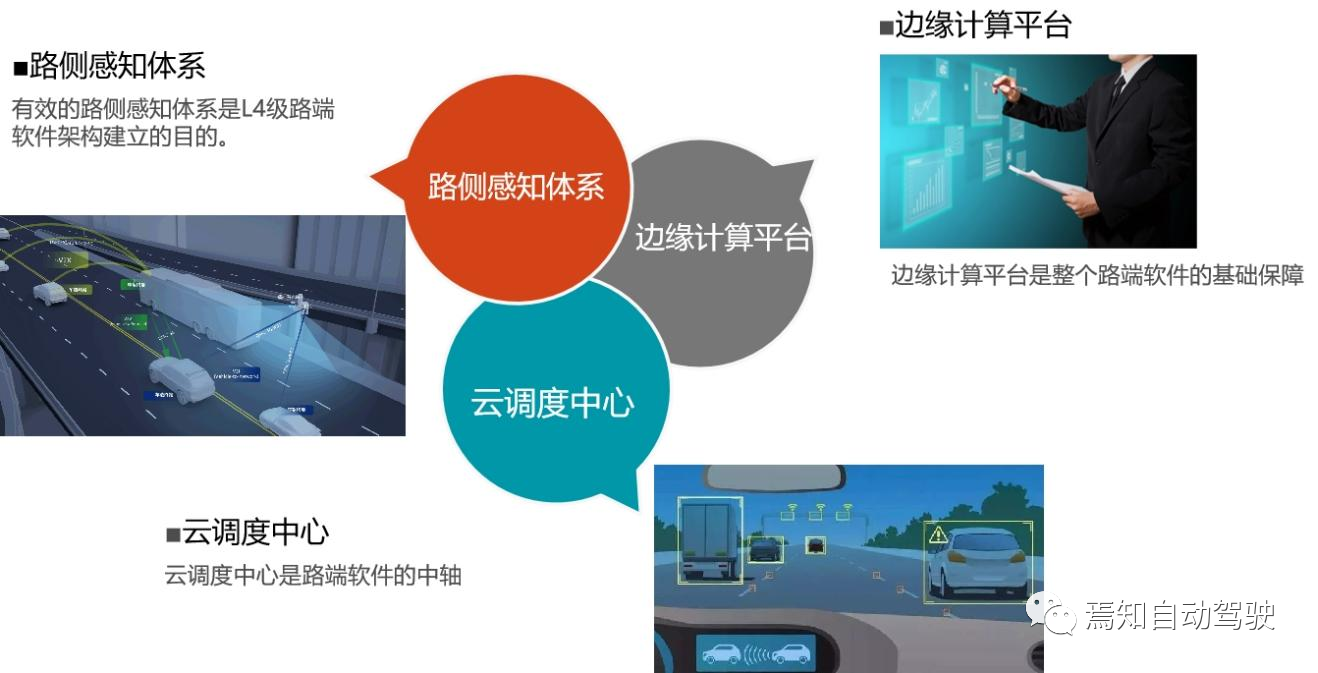
①路端感知体系
对于路端感知体系来说,在L4级路侧提出“超视距”感知的理念,设计开发了主动超视距视频传输、超视距可行使区域检测和超视距障碍物感知三个重要感知模块。
②云端信息调度
L4级路侧感知系统需要打造了一个拥有云计算能力的远程调度和监控中心,用于实现云端自动驾驶控制和交通调度。
③边缘计算平台
利用虚拟化技术及网络技术整合大规模可扩展的计算、存储、数据、应用等分布式计算资源完成 AI 模型算法的学习训练,能实现在云端训练 AI 模型,通过车云协同技术将其部署到嵌入式平台,使 AI 算法在车端自动驾驶系统上得到深度应用。
总结
自动驾驶技术的发展已经到了必须改造基础设施的阶段,要全面构筑“人-车-路”全域数据感知的智能路网,进入“聪明的车”与“智能的路”相互协同的新阶段。也就是说,从自主驾驶转向车路协同。可以先对简单相对固定的场景进行路端改造。
比如乘用车行驶路线因个人和时间的不同而不同,短期内难以大面积铺开。但对固定物流路线改造则相对容易,由于使用率高,边际成本将大大降低。对于广泛应用的小汽车,自主驾驶的技术路线更为可能和现实。当然,对于城市公交和矿区、码头的搬运车辆等,由于固定线路和特定区域,可充分利用车路协同技术的优势。
本文转自:焉知自动驾驶,转载此文目的在于传递更多信息,版权归原作者所有。如不支持转载,请联系小编demi@eetrend.com删除。





