机器视觉系统中,镜头相当于人的眼睛,其主要作用是将目标的光学图像聚焦在图像传感器(相机)的光敏面阵上。视觉系统处理的所有图像信息均通过镜头得到,镜头的质量直接影响到视觉系统的整体性能。下面对机器视觉工业镜头的相关专业术语做以详解。
一、失真
可分为枕形失真和桶形失真,如下图示:
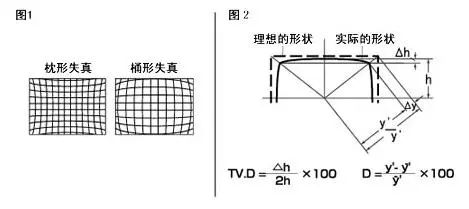
二、电视失真:
实际边长的歪曲形状与理想的形状的百分比算出的值。
三、光学倍率
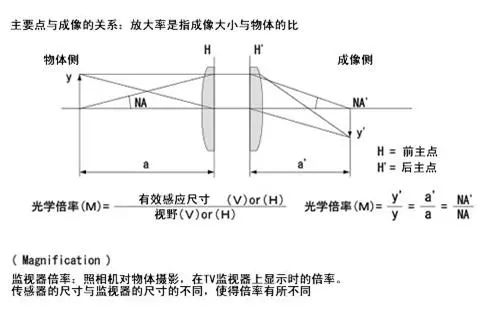
四、监视放大
计算方法:

例:VS-MS1+10x镜头 1/2” CCD 照相机, 14”监视器上的成像

0.1mm的物体在监视器得到的是44.45mm的成像
※有时根据TV监视器的扫描状态,以上的简易计算将有一些变化。
五、解析度
表示了所能见到了2点的间隔0.61x 使用波长(λ)/ NA=解析度(μ)
以上的计算方法理论上可以计算出解析度,但不包括失真。
※使用波长为550nm
六、解像力
1mm中间可以看到黑白线的条数。单位(lp)/mm.
七、MTF(Modulation Transfer Function)
成像时再现物体表面的浓淡变化而使用的空间周波数和对比度。
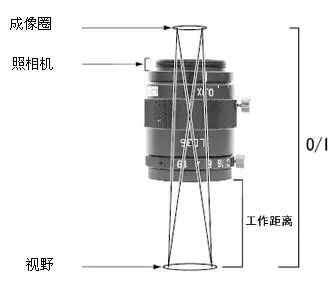
八、工作距离(Working Distance)
镜头的镜筒到物体的距离
九、O/I(Object to Imager)
物像间距离即物体到像间的长度。
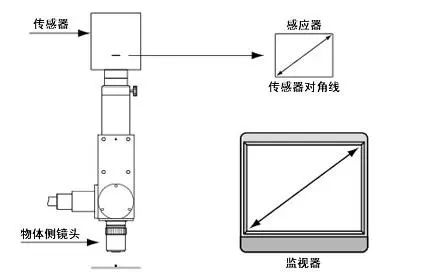
十、成像圈
成像尺寸φ,要输入相机感应器尺寸。
十一、照相机 Mount
C-mount: 1" diameter x 32 TPI: FB: 17.526mm
CS-mount: 1" diameter x 32 TPI: FB: 12.526mm
F-mount: FB:46.5mm
M72-Mount: FB 厂家各有不同
十二、视野 (FOV)
视野指使用照相机以后看到的物体侧的范围
照相机有效区域的纵向长度(V)/光学倍率(M)=视野(V)
照相机有效区域的横向长度(H)/光学倍率(M)=视野(H)
*技术资料上的视野范围是指由光源及有效区域的一般数值计算出来的值。
照相机有效区域的纵向长度(V)or(H)=照相机一个画素的尺寸×有効画素数(V)or(H)
来计算。
十三、景深
景深是指成像后物体的距离。同样,照相机侧的范围称为焦点深度。具体的景深的值多少略有不同。
十四、焦距 (f)
f(Focal Length)光学系的后主点(H2)到焦点面的距离。
十五、FNO
镜头从无限远时,亮度表示的数值,值越小越亮。FNO=焦距/入射孔径或有効口径=f/D
十六、实效F
有限距离时镜头的明亮度。
实效F = (1 +光学倍率) x F#
实效F = 光学倍率 / 2NA
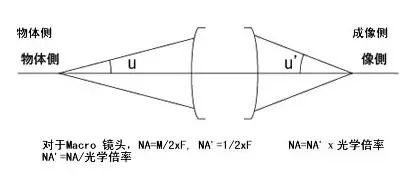
十七、NA(Numerical Aperture)
物体侧的 NA = sin u x n
成像侧的NA' = sin u'x n'
如下图所示 入社角度 u, 物体侧折射率n, 成像侧的折射率' n'
NA = NA' x 放大率
十八、边缘亮度
相对照度是指中央的照度与周边的照度的百分比。
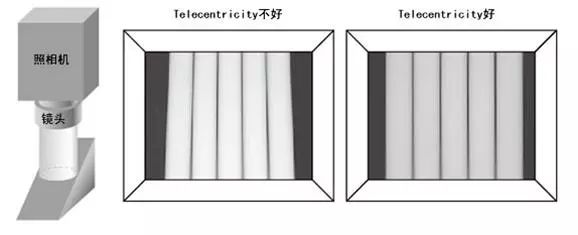
十九、远心镜头s
主光线与镜头光源平行的镜头。有物体侧的远心,成像侧的远心,两侧的远心行头等方式。
二十、远心
Telecentricity是指物体的倍率误差。倍率误差越小,Telecentricity越高。Telecentricity有各种不同的用途,在镜头使用前,把握Telecentricity很重要。远心镜头的主光线与镜头的光轴平行,Telecentricity不好,远心镜头的使用效果就不好;Telecentricity可以用下图进行简单的确认。
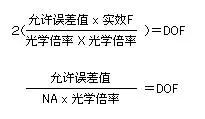
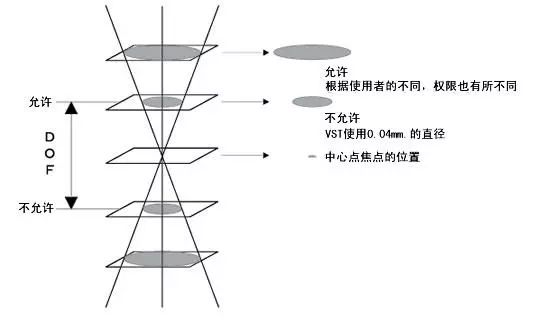
二十一、景深 (DOF)
景深(Depth of Field)可以用以下的计算式计算出来:
景深 = 2 x Permissible COC x 实效F / 光学倍率² = 允许误差值 / (NA x 光学倍率)
(使用的是0.04mm的Permissible COC)
二十二、通风盘及解析度

Airy Disk是指通过没有失真的镜头在将光集中一点时,实际上形成的是一个同心圆。这个同心圆就叫做Airy Disk。Airy Disk的半径r可以通过以下的计算公式计算出来。这个值称为解析度。r= 0.61λ/NA Airy Disk的半径随波长改变而改变,波长越长,光越难集中于一点。 例:NA0.07的镜头 波長550nm r=0.61*0.55/0.07=4.8μ
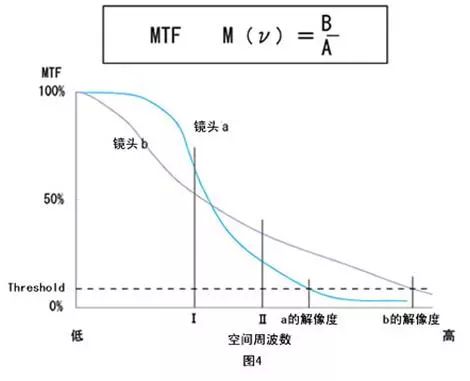
二十三、 MTF 及解析度
MTF(Modulation Transfer Function) 是指物体表面的浓淡变化,成像侧也被再现出来。表示镜头的成像性能,成像再现物体的对比度的程度。测试对比性能,用的是具有特定空间周波数的黑白间隔测试。空间周波数是指1mm的距离浓淡变化的程度。
图1所示,黑白矩阵波,黑白的对比度为100%.这个对象被镜头摄影后,成像的对比度的变化被定量化。基本上,不管什么镜头,都会出现对比度降低的情况。最终对比度降低至0%。,不能进行颜色的区别。
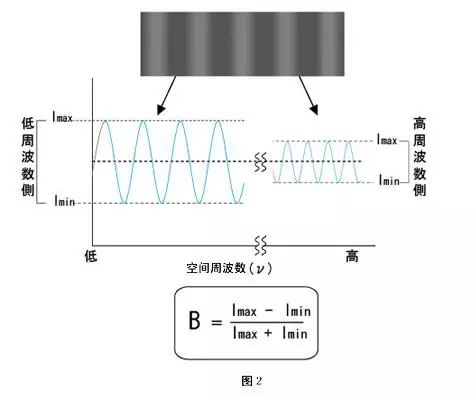
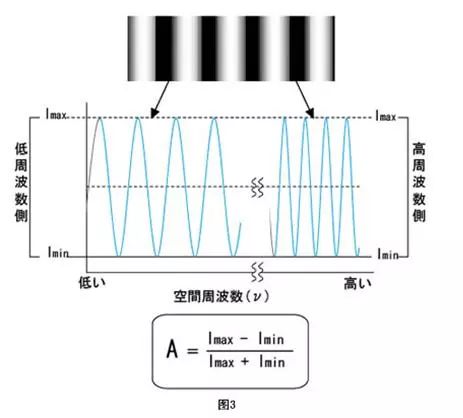
图2、3显示了物体侧与成像侧的空间周波数的变化。横轴表示空间周波数,纵轴表示亮度。物体侧与成像侧的对比度由A、B计算出来。MTF由A,B的比率计算出来。
解析度与MTF的关系:解析度是指2点之间怎样被分离认识的间隔。一般从解析度的值可以判断出镜头的好坏,但是实际是MTF与解析度有很大的关系。图4显示了两个不同镜头的MTF曲线。镜头a 解析度低但是具有高对比度。镜头b对比度低但是解析度高。
来源:中国机器视觉商城





