1、GMM
2、AHP
https://jingyan.baidu.com/article/cbf0e500eb95582eaa28932b.html
3、HMM
http://www.cnblogs.com/skyme/p/4651331.html
4、KNN
http://www.cnblogs.com/ybjourney/p/4702562.html
5、K-Means
主要是来计算数据聚集的算法,主要通过不断地取离种子点最近均值的算法。
6、Mean-shift方法
一般是指一个迭代的步骤,即先算出当前点的偏移均值,移动该点到其偏移均值,然后以此为新的起始点,继续移动,直到满足一定的条件结束。
http://www.cnblogs.com/liqizhou/archive/2012/05/12/2497220.html
7、协方差矩阵
协方差反映的是两个随机变量之间的相关性。
8、SIFT
(Scale-invariantfeature transform)是一种检测局部特征的算法
ü SIFT算法由D.G.Lowe 1999年提出,2004年完善总结。后来Y.Ke将其描述子部分用PCA代替直方图的方式,对其进行改进。
ü SIFT算法是一种提取局部特征的算法,在尺度空间寻找极值点,提取位置,尺度,旋转不变量
ü SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性。
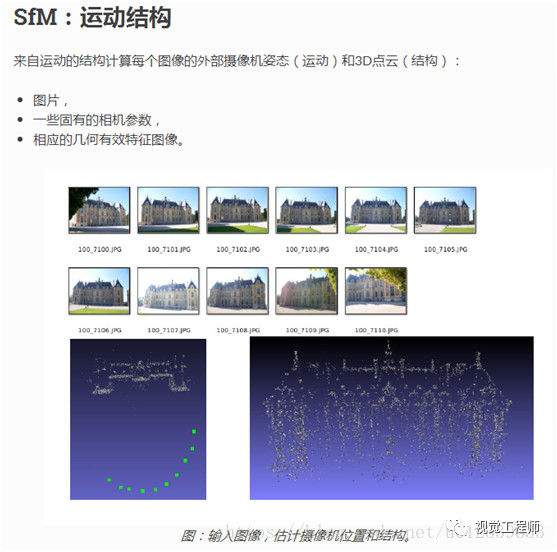
9、SFM
Structurefrom Motion
10、回归问题
给定多个自变量、一个因变量以及代表它们之间关系的一些训练样本,如何来确定它们的关系?
建模:目的就是求这个因变量关于这多个自变量的函数。而这个函数能够比较精确的表示这个因变量和这多个自变量之间的关系。
http://blog.csdn.net/vshuang/article/details/5512853
11、SVM
支持向量机基本上是最好的有监督学习算法了。

12、Haar分类器:
(1) Boosting算法成为了一个提升分类器精确性的一般性方法。
(2) 强分类器的级联
http://blog.csdn.net/zouxy09/article/details/7922923
13、RBM限制波尔兹曼机:
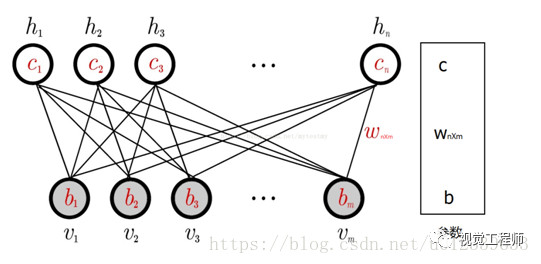
一是对数据进行编码,然后交给监督学习方法去进行分类或回归,二是得到了权重矩阵和偏移量,供BP神经网络初始化训练。
http://blog.sciencenet.cn/blog-110554-876316.html
15、径向基函数(Radial Basis Function,RBF)插值:
RBF 方法是一系列精确插值方法的组合;即表面必须通过每一个测得的采样值。有以下五种基函数:
- 薄板样条函数
- 张力样条函数
- 规则样条函数
- 高次曲面函数
- 反高次曲面函数
在不同的插值表面中,每种基函数都有不同的形状和结果。RBF方法是样条函数的一个特例。
从概念上讲,RBF类似于在最小化表面的总曲率时通过测得的样本值拟合橡皮膜。
16、相机标定:
像机标定(Camera calibration)简单来说是从世界坐标系换到图像坐标系的过程,也就是求最终的投影矩阵的过程。
http://www.cnblogs.com/Tigerwang1218/p/7251311.html
18、最小二乘法:
最小二乘法(又称最小平方法)是一种数学优化技术。它通过最小化误差的平方和寻找数据的最佳函数匹配。利用最小二乘法可以简便地求得未知的数据
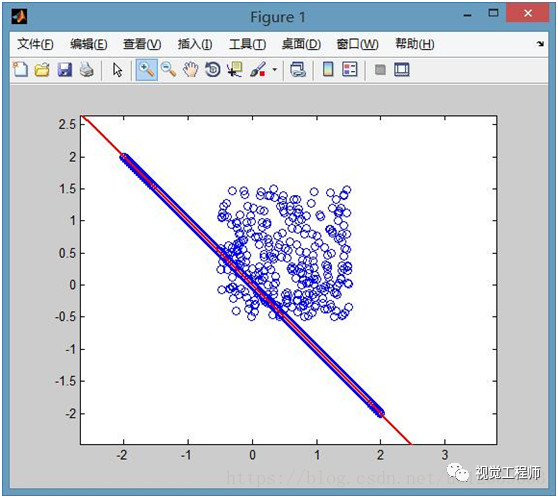
19、RANSAC算法:
RANSAC是“RANdom SAmple Consensus(随机抽样一致)”的缩写。它可以从一组包含“局外点”的观测数据集中,通过迭代方式估计数学模型的参数。它是一种不确定的算法——它有一定的概率得出一个合理的结果;为了提高概率必须提高迭代次数。
RANSAC的基本假设是:
(1)数据由“局内点”组成,例如:数据的分布可以用一些模型参数来解释;
(2)“局外点”是不能适应该模型的数据;
(3)除此之外的数据属于噪声。
下图是对RanSaC算法效果的说明。图中有一些点显然是满足某条直线的,另外有一团点是纯噪声。目的是在大量噪声的情况下找到直线方程,此时噪声数据量是直线的3倍。
20、集束调整:
BA(BundleAdjustment)的本质是一个优化模型,其目的是最小化重投影误差。
http://blog.csdn.net/OptSolution/article/details/64442962
21、对极几何:
对极几何(Epipolar Geometry)描述的是两幅视图之间的内在射影关系,与外部场景无关,只依赖于摄像机内参数和这两幅试图之间的的相对姿态。
提到对极几何,一定是对二幅图像而言,对极几何实际上是“两幅图像之间的对极几何”,它是图像平面与以基线为轴的平面束的交的几何(这里的基线是指连接摄像机中心的直线),以下图为例:对极几何描述的是左右两幅图像(点x和x’对应的图像)与以CC’为轴的平面束的交的几何!
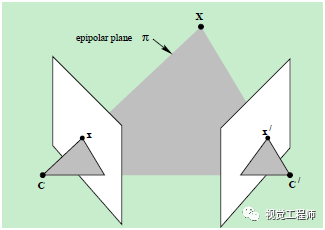
关于上图的具体描述是:

上图中的灰色区域就是我们研究的对极平面。
http://blog.csdn.net/lancelot_vim/article/details/51724330
来源:智能算法





