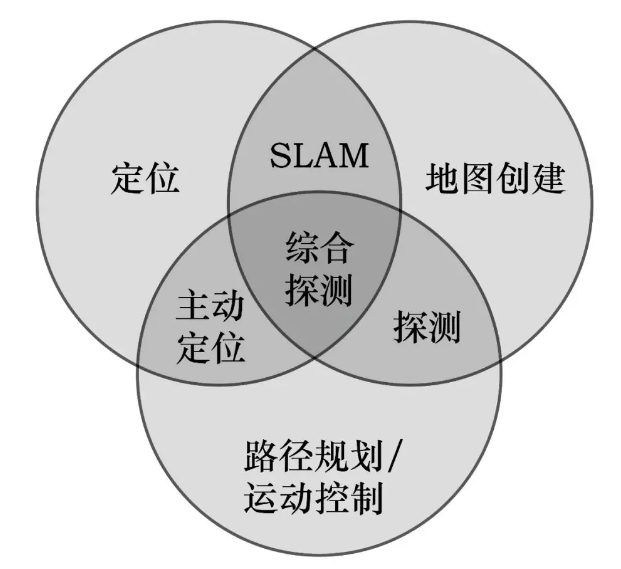
机器人自主定位导航需要解决三个问题:定位、建图与路径规划。
定位:
当你打开手机中的导航软件,在选择前往目的地的最佳路线之前,首先要做的动作是什么呢?没错,就是定位。我们要先知道自己在地图中的位置,才可以进行后续的路径规划。机器人也是如此。
在机器人实时定位问题中,由于通过机器人运动估计得到的机器人位置信息通常具有较大的误差,我们还需要使用测距单元得到的周围环境信息更正机器人的位置。
目前,常见的测距单元包括激光测距、超声波测距以及图像测距三种。其中,激光雷达凭借良好的指向性和高度聚焦性,成为移动机器人的核心传感器,同时它也是目前最可靠、最稳定的定位技术。
建图:
地图构建也是机器人实现自主导航行动的前提。地图一方面可以帮助机器人配合自身的传感器进行实时定位,同时也用于后续展开行动时,导航过程的路径规划。
虽然环境地图可以通过事先人为绘制并提供给机器人设备,但由于这类人为绘制的地图大多与真实场景存在区别,且与机器人传感器所观测的数据存在区别,因此在实际应用中存在挑战。
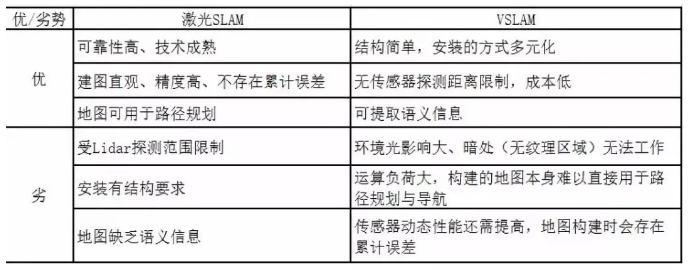
目前,机器人SLAM建图主要有激光SLAM和VSLAM两种。
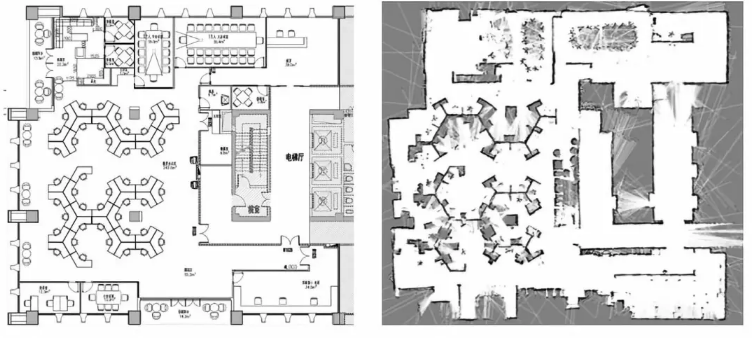
采用激光雷达的SLAM技术可以直接绘制高精度的环境地图,并且因为地图数据直接记录了环境的障碍物情况,因此地图内容可直接用于后续机器人导航和路径规划,并且比较直观,易于人理解。
激光SLAM主要采用栅格地图的表现方式,一方面它能表示空间环境中的很多特征,机器人可以用它来进行路径规划,另一方面,它又不直接记录传感器的原始数据,相对实现了空间和时间消耗的最优。因此,栅格地图是目前机器人所广泛应用的地图存储方式。
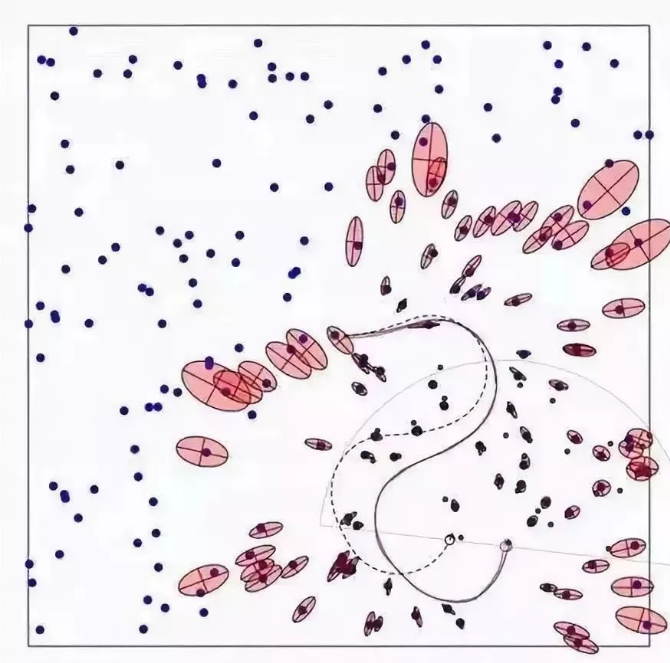
近些年来,另一种SLAM技术在研究领域得到了长足的发展。它不采用激光雷达作为核心传感器,而采用了目前更加普遍的图像传感器(摄像头)作为地图构建的主要数据输入源。这种基于视觉的SLAM方法被称为VSLAM(Visual SLAM)。
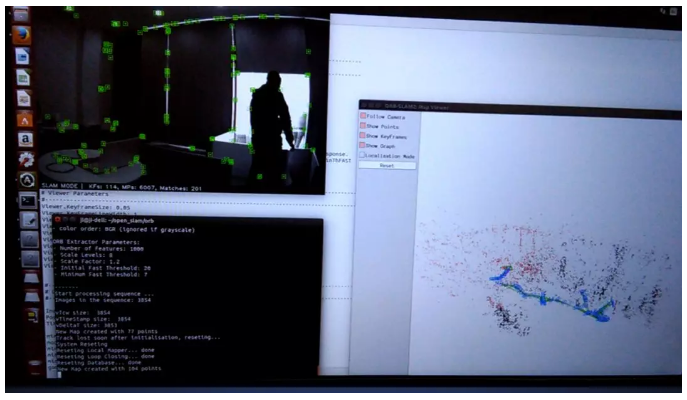
VSLAM主要采用特征点地图作为表现方式,虽然数据量少,但是它往往不能反应所在环境的一些必须的信息,比如环境中障碍物的位置。VSLAM技术中,多采用这种地图来解决机器人定位问题。想让机器人进行自主避障和路径规划,还需要额外配置距离传感器,如激光雷达、超声波来完成。
相比于激光雷达,视觉传感器可以提供更为丰富的环境信息,并且视觉传感器天生不需要进行机械扫描,安装要求也较低,因此被行业给予厚望。
不过目前这类方法距离实际应用上有较多技术挑战有待解决。例如当环境光发生变化(如在黑夜)亦或环境中纹理数据较弱的情况下,目前VSLAM的可靠性将受很大影响。此外,目前VSLAM所构建的地图也难以用于后续的导航定位。所以行业内使用VSLAM技术的机器人产品相对较小,但相信假以时日,VSLAM方式将逐步成为新的行业主流。
路径规划:
SLAM≠自主定位导航,不解决运动问题,需要在完成SLAM之后,进行一个叫做目标点导航的能力,规划一条从A点到B点的路径出来,然后让机器人移动过去。
路径规划分为:全局规划和局部规划。
全局规划:是最上层的运动规划逻辑,它按照机器人预先记录的环境地图并结合机器人当前位姿以及任务目标点的位置,在地图上找到前往目标点最快捷的路径。 局部规划:当环境出现变化或者上层规划的路径不利于机器人实际行走的时候(比如机器人无法按照规划的路径完成特定转弯半径的转向),局部路径规划将做出微调。
这种从A点到B点进行路径规划并控制移动的运动规划算法的目标在于尽可能快速的抵达目的地,同时避免让机器人进入环境中的无关区域。但是在针对一些特殊情况,如:扫地机器人,需要的就不是规划从A点到B点的最短路径,而是尽可能覆盖A到B点的全部区域。 所以,除了上述两种较为典型的路径规划算法之外,还需要与实际应用相结合的算法模型。因此,让机器人实现定位、建图以及导航,还是有非常多的工作要做的。这个需要整个行业共同努力的,也是目前的主要挑战之一。
本文转自:博客园 - 机器人自主行走不是梦,转载此文目的在于传递更多信息,版权归原作者所有。





