客观物体在空间上是三维的,但是人们从客观景物上得到的图像往往是二维的。光栅投影就是通过获取的二维信息来反映并还原物体的三维信息。
一、三维形貌测量技术的发展
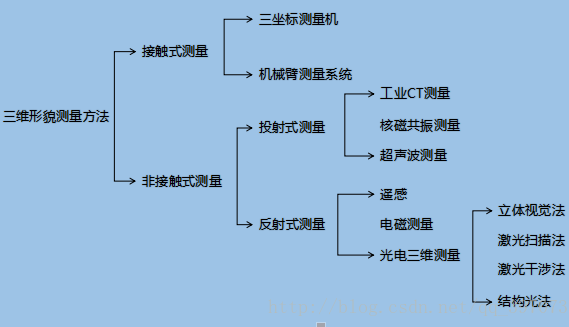
三维形貌测量技术又称3D 轮廓术(3DProfilometry),是一种通过运用仪器获取被测物体外部形貌数据并建立数字化模型的方法和技术。由于3D 轮廓术所涵盖的学科门类较多,其分类方法也多种多样,目前普遍接受且广泛使用的分类方法是按照测量过程中是否与物体接触,分为接触式测量和非接触式测量两大类。
(1)接触式测量由于测量仪器需要与被测物体表面进行接触,虽然测量精度较高但测量速度很慢,并且容易划伤被测物体,以及一些复杂的区域难以测量。
(2)非接触式测量通过测量方式的不同可分为投射式和反射式两种。投射式测量通过仪器获取连续的二维切片来恢复物体的三维信息;反射式测量通过获取被测物体表面的反射信息来恢复被测物体的三维信息。光栅投影法就是反射式测量结构光法中的一种方法。
二、机构光法
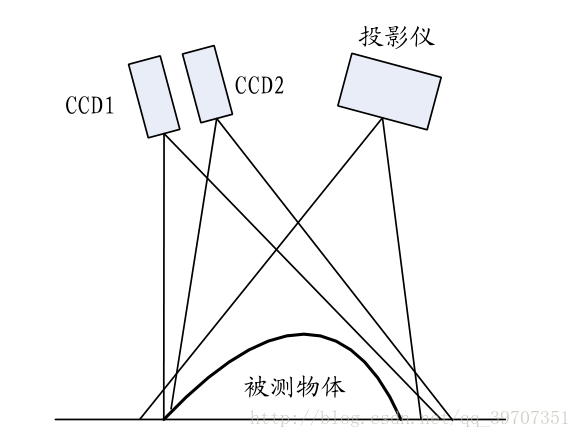
机构光法是通过一组由投射设备和摄像机组成的系统,投射设备投射特定的光信息到物体表面,摄像头同步采集,根据物体表面对光信号的反射变化来计算物体的位置和深度信息,进而复原物体的整个三维形貌。而光栅投影技术就是利用结构化光栅条纹进行投影。
光栅投影进行三维重建的基本原理:
将光栅分别投影到参考平面和被测物体表面,由于参考平面选取的是水平平面,投影到上面的参考光栅不会发生变形;当光栅投影到被测物体表面时,光栅会产生不同程度的变形,是由于投影光栅受到了被测物体表面高度的调制。所放置的被测物体高度不同,光栅的相位变化程度也随之不同,二维平面变形条纹的相位变化中携带有物体表面的三维形貌信息。因此,通过求取相位的变化值,可以得到物体在相应点处的高度,从而得到三维物体的轮廓形状。
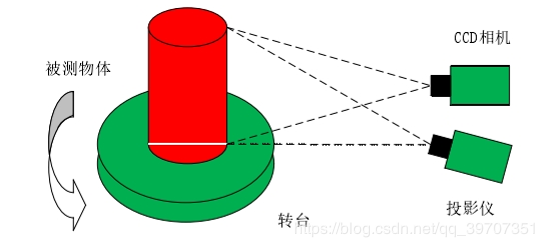
测量系统结构示意图如下所示:
三、形貌测量方法
近几年来,利用结构化光栅条纹投影进行三维物体表面形貌测量的方法受到了广泛关注,因此有大量的形貌测量方法被陆续提出。主要包括傅立叶变换轮廓术FTP 、相位测量形貌轮廓PMP、调制测量形貌轮廓术MMP、空间相位检测法SPD 、莫尔条纹技术MT、彩色编码条纹投影法CFP 等。在上述众多的结构光测量方法中,傅里叶变换轮廓术和相位测量形貌轮廓术是目前使用相对比较广泛的两种三维形貌测量方法。
(1)傅立叶变换轮廓术
FTP 是一种通过对所拍摄的条纹图像在空间域进行快速傅立叶变换、滤波和傅立叶逆变换等操作,获取光栅在物体表面的连续相位分布,进而结合光学几何测量物体表面信息的三维形貌测量方法。该方法仅需一幅采集到的光栅条纹图就可以恢复物体的形貌,测量速度快,广泛应用于快速、实时测量环境。但该方法对物体表面的反射系数较为敏感,因此测量精度不是很高。
(2)相位测量形貌轮廓术
PMP 通过投射具有特殊相移差的多幅条纹图像到被测物体表面,利用三角函数法计算所获取图像序列中每个像素的相位值,进而计算物体表面高度信息。该方法至少需要投影三幅以上的图像才能完成相位计算,因此测量速度低于 FTP;同时要求测量过程中物体不能移动,因此它更适合于静态测量。通过增加投影的条纹数量,采用特定的误差补偿与平差方法,PMP 可以获得比 FTP 更高的测量精度,因此广泛应用于工业测量领域。
四、相位测量形貌轮廓术
在相位测量形貌轮廓术测量系统中,数字化、小型化、自动化是其主要的发展方向,简便、快速、精确是目前研究的主要目标,相位测量、相位展开、相位-高度映射、三维立体拼接是基于 PMP 三维形貌测量系统的主要研究内容。下面,将分别就这几个主要研究内容的研究现状进行简要的介绍。
(1)相位测量
相移干涉法 PSI 是目前相位测量的主要方法。在 PSI 技术中,要求投影至少 3 幅以上相移光栅图像到静止物体表面,并按照光学成像原理和信号处理方法对每个像素点的相位值进行求解。在现有研究中,用于测量的光栅图像主要包括正弦光栅和梯形光栅两种,用于计算相位主值的相移方法包括 3 步相移法、4 步相移法、5步相移法等。
(2)相位展开
相依干涉法测量得到的相位也称为包裹相位,在全场测量域内呈周期性 0-2π变化,因此需要展开成全场范围内的全局相位,以进行相位-高度映射。相位展开也称相位去包裹或相位解缠,是目前 PMP研究的另一项重要内容,其主要任务是正确计算采集图像上每个像素点所在条纹周期中的级数。按照工作原理的不同,相位展开方法总体上分为空间相位展开SPU和时间相位展开TPU两类。
(3)相位-高度映射
建立高精度的相位-高度映射关系是结构光测量技术中的关键技术之一。为降低投影仪、摄像机由于光学原因产生的畸变,标定技术是必不可少的环节。目前已有的相位-高度映射算法主要基于以下两种标定方法:
1. 根据系统的结构参数,严格限制投影仪和摄像机的姿态,结合参考平面对相位-高度映射关系进行一体化标定;
2. 把投影仪当相机看待,将结构光测量系统的标定转化为成熟的双目视觉标定 。
(4) 三维立体拼接
三维立体拼接技术是实现全貌测量的关键,它的任务是确定三维数据块之间的转换关系,也就是把测量数据块统一到一个全局坐标系中。正确标定三维数据块之间的测量位置关系是三维拼接的主要研究内容,目前主要有以下三类方法:
1. 软件迭代法
在未知数据块之间测量关系的情况下,通过软件迭代算法逐步求解这一关系并进行拼接。
2. 控制点法
通过在被测表面人工设置控制点,提取控制点在两次测量图像中的二维坐标,通过双目视觉原理进行摄像机标定,以获取三维数据块之间的测量位置关系。

3. 移动平台法
通过预先精确设定测量的硬件平台环境,控制每次测量的移动位置,在事先标定好每个测量位置的情况下,直接对每次测量获得的数据块进行拼接。
来源:CSDN,作者:awenwenwem,转载此文目的在于传递更多信息,版权归原作者所有。
原文:https://blog.csdn.net/qq_39707351/article/details/78229116
版权声明:本文为博主原创文章,转载请附上博文链接!



