前面介绍的几种滤波器都属于平滑滤波器(低通滤波器),用来平滑图像和抑制噪声的;而锐化空间滤波器恰恰相反,主要用来增强图像的突变信息,图像的细节和边缘信息。平滑滤波器主要是使用邻域的均值(或者中值)来代替模板中心的像素,消弱和邻域间的差别,以达到平滑图像和抑制噪声的目的;相反,锐化滤波器则使用邻域的微分作为算子,增大邻域间像素的差值,使图像的突变部分变的更加明显。
本位主要介绍了一下几点内容:
• 图像的一阶微分和二阶微分的性质
• 几种常见的一阶微分算子
• 二阶微分算子 - Laplace 拉普拉斯算子
• 一阶微分算子和二阶微分算子得到边缘的对比
一阶微分和二阶微分的性质
既然是基于一阶微分和二阶微分的锐化空间滤波器,那么首先就要了解下一阶和二阶微分的性质。
图像的锐化也就是增强图像的突变部分,那么我们也就对图像的恒定区域中,突变的开始点与结束点(台阶和斜坡突变)及沿着灰度斜坡处的微分的性质。微分是对函数局部变化率的一种表示,那么对于一阶微分有以下几个性质:
• 在恒定的灰度区域,图像的微分值为0.(灰度值没有发生变换,自然微分为0)
• 在灰度台阶或斜坡起点处微分值不为0.(台阶是,灰度值的突变变化较大;斜坡则是灰度值变化较缓慢;灰度值发生了变化,微分值不为0)
• 沿着斜坡的微分值不为0.
二阶微分,是一阶微分的导数,和一阶微分相对应,也有以下几点性质:
• 在恒定区域二阶微分值为0
• 在灰度台阶或斜坡的起点处微分值不为0
• 沿着斜坡的微分值为0.
从以上图像灰度的一阶和二阶微分的性质可以看出,在灰度值变化的地方,一阶微分和二阶微分的值都不为0;在灰度恒定的地方,微分值都为0.也就是说,不论是使用一阶微分还是二阶微分都可以得到图像灰度的变化值。
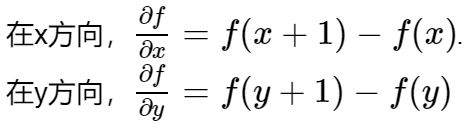
图像可以看着是二维离散函数,对于图像的一阶微分其计算公式如下:
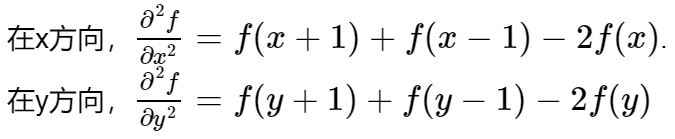
对于二阶微分有:
对于图像边缘处的灰度值来说,通常有两种突变形式:
• 边缘两边图像灰度差异较大,这就形成了灰度台阶。在台阶处,一阶微分和二阶微分的值都不为0.
• 边缘两边图像灰度变化不如台阶那么剧烈,会形成一个缓慢变换的灰度斜坡。在斜坡的起点和终点一阶微分和二阶微分的值都不为0,但是沿着斜坡一阶微分的值不为0,而二阶微分的值为0.
对于图像的边缘来说,通常会形成一个斜坡过度。一阶微分在斜坡处的值不为0,那么用其得到的边缘较粗;而二阶微分在斜坡处的值为0,但在斜坡两端值不为0,且值得符号不一样,这样二阶微分得到的是一个由0分开的一个像素宽的双边缘。也就说,二阶微分在增强图像细节方面比一阶微分好得多,并且在计算上也要比一阶微分方便。
梯度图
在图像处理中的一阶微分通常使用梯度的幅值来实现。对于图像 f ( x , y ) ,f在坐标 ( x , y ) 处的梯度是一个列向量
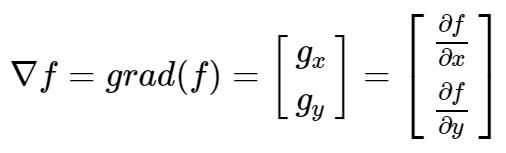
该向量表示图像中的像素在点 ( x , y ) 处灰度值的最大变化率的方向。
向量 ∇f 的幅值就是图像 f ( x , y ) 的梯度图,记为M(x,y)

M ( x , y ) 是和原图像 f( x , y ) 同大小的图像。由于求平方的根运算比较费时,通常可以使用绝对值的和来近似

从上面可以看出,要得到图像的梯度图,有以下步骤:
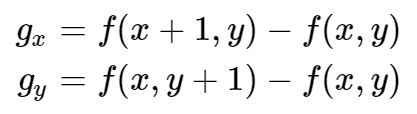
• 图像在 x 方向的梯度 gx
• 图像在 y 方向的梯度 gy
• M ( x , y ) =∣gx∣+∣gy∣
一阶梯度算子
图像是以离散的形式存储,通常使用差分来计算图像的微分,常见的计算梯度的模板有以下几种
• 根据梯度的定义
可以得到模板 [ −1 1 ] 和

使用该方法计算的图像的梯度只是考虑单个像素的差值,并没有利用到图像的像素的邻域特性。
• Robert交叉算子
在图像处理的过程中,不会只单独的对图像中的某一个像素进行运算,通常会考虑到每个像素的某个邻域的灰度变化。因此,通常不会简单的利用梯度的定义进行梯度的计算,而是在像素的某个邻域内设置梯度算子。考虑,3×3 区域的像素,使用如下矩阵表示:
令中心点 z5 表示图像中任一像素,那么根据梯度的定义,z5 在在 x 和 y 方向的梯度分别为:gx=z9−z5 和gy=z8−z6 ,梯度图像 M ( x , y )

根据上述公式,Robert在1965年提出的Robert交叉算子
• Sobel算子
Robert交叉算子的尺寸是偶数,偶数尺寸滤波器没有对称中心计算效率较低,所以通常滤波器的模板尺寸是奇数。仍以3×3 为例,以 z5 为对称中心(表示图像中的任一像素),有

利用上述公式可以得到如下两个卷积模板,分别计算图像在 x 和 y 风向的梯度
第一个模板,第三行和第一行的差近似x方向的偏微分;第二个模板,第三列和第一列的差近似y方向的偏微分,而且模板的所有系数只和为0,表示恒定灰度区域的响应为0.
基于OpenCV的一阶梯度算子实现
• Sobel算子
在OpenCV中封装了Sobel算子,其函数为Sobel。使用Sobel能够很方便的计算任意尺寸的x和y方向的偏微分,具体如下:
void sobel_grad(const Mat &src, Mat &dst)
{
Mat grad_x, grad_y;
Sobel(src, grad_x, CV_32F, 1, 0);
Sobel(src, grad_y, CV_32F, 0, 1);
//convertScaleAbs(grad_x, grad_x);
//convertScaleAbs(grad_y, grad_y);
//addWeighted(grad_x, 0.5, grad_y, 0.5, 0, dst);
magnitude(grad_x, grad_y, dst);
convertScaleAbs(dst, dst);
}上述代码中调用Sobel分别得到图像在x和y方向的偏微分 gx 和 gy ,然后相加得到得到图像的梯度图。
其余的几个函数说明,convertScaleAbs将图像类型转换为CV_8U;addWeighted按一定的权值将两个图像相加;magnitude求两个图像的幅值,其公式为 ,具体的参数说明可参考OpenCV的官方文档。
,具体的参数说明可参考OpenCV的官方文档。
• 基于定义和Robert交叉算子的计算
对于这两种算子,OpenCV中并没有提供具体的函数,不过可以利用filter2D函数来实现。filter2D是OpenCV中对图像进行卷积运算的一个很重要的函数,该函数能够使用任意的线性卷积核对图像进行卷积运算。
void robert_grad(const Mat& src, Mat &dst)
{
Mat grad_x, grad_y;
Mat kernel_x = (Mat_<float>(2, 2) << -1, 0,0,1);
Mat kernel_y = (Mat_<float>(2, 2) << 0, -1, 1, 0);
filter2D(src, grad_x, CV_32F, kernel_x);
filter2D(src, grad_y, CV_32F, kernel_y);
//convertScaleAbs(grad_x, grad_x);
//convertScaleAbs(grad_y, grad_y);
//addWeighted(grad_x, 1, grad_y, 1, 0, dst);
magnitude(grad_x, grad_y, dst);
}构造好Robert交叉算子,然后调用filter2D即可;基于定义的计算方法于此类似,不在赘述。
结果三种方法计算得到的梯度图,如下:
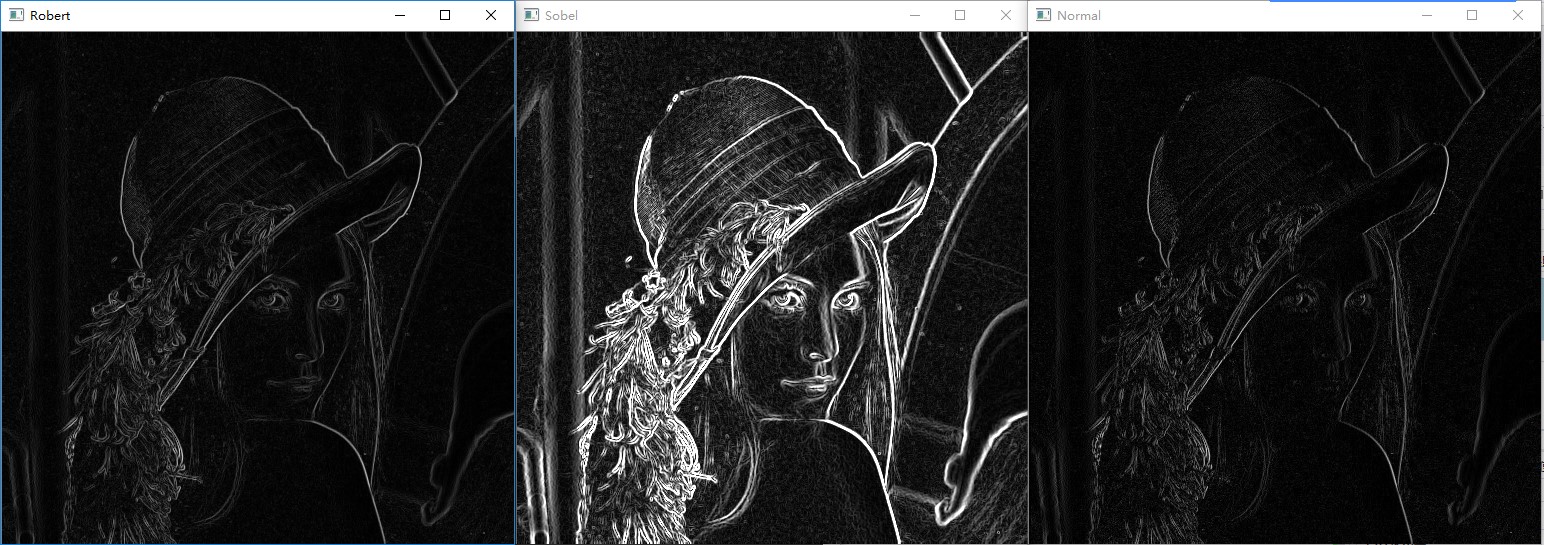
从上面结果可以看出,Robert交叉算子和基于定义得到的边缘图,得到的边缘较细并且不是很连续;Sobel得到边缘较粗,线条连续,效果明显好于其他的两种算子。
二阶微分算子 - LapLace 拉普拉斯算子
二阶微分算子的代表就是拉普拉斯算子,其定义如下:
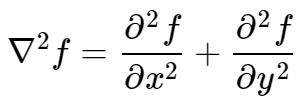
其中:
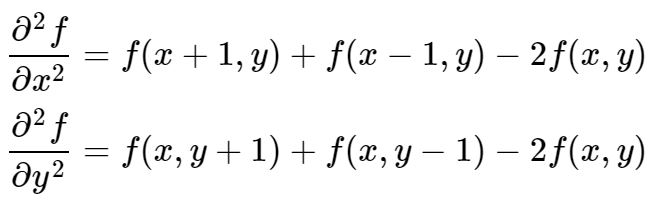
对于上述的 3×3 区域,则有

其得到的模板如下:
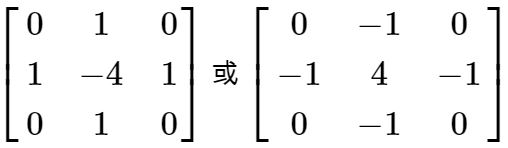
注意,模板中心的符号,并且模板的所有系数之和为0.
在OpenCV中有对LapLace的封装,其函数为Laplacian,其使用的模板中心的系数为负,具体参数说明参见OpenCV文档,其得到的边缘图和一阶微分算子得到边缘图对比结果如下:
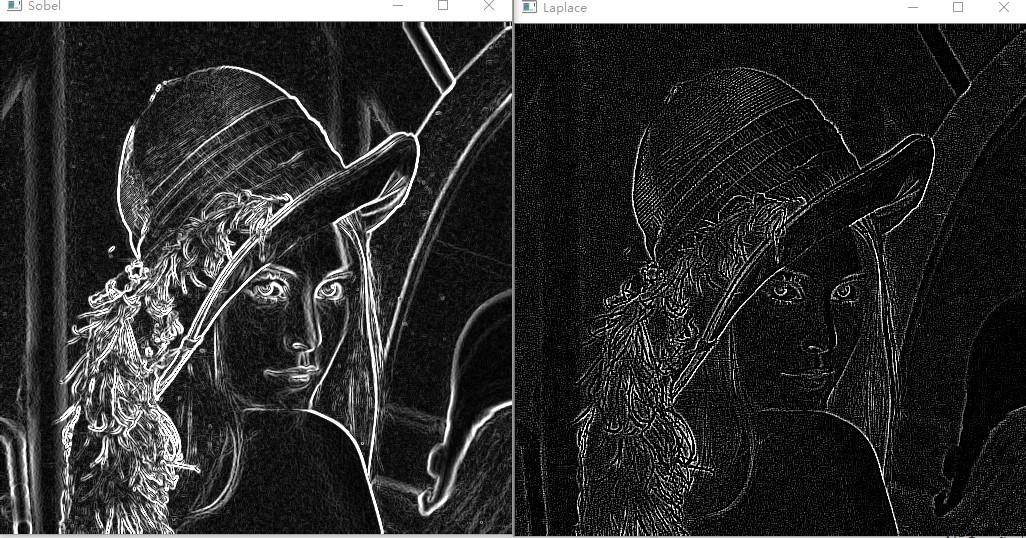
• 一阶微分算子Sobel得到的边缘较粗
• 二阶微分算子Laplace得到的边缘则较细,并且边缘是双边缘
• Lpalace算子对噪声比较敏感,得到的边缘图像上噪声较明显
由于Laplace算子对噪声敏感,会得到双边,并且并不能检测边缘的方向,其通常不用于直接的边缘检测,只是起到辅助作用。检测某像素实在边缘的亮的一侧还是暗的一侧,利用“零跨越”确定边缘的位置。
总结
本文主要介绍了图像空间域的锐化算子(也就是边缘检测算子),这些算子都是基于图像的微分的:一阶微分和二阶微分(拉普拉斯算子)。
由于一阶微分和二阶微分有各自的特点,其得到的图像边缘也不相同:一阶微分得到的图像边缘较粗,二阶微分得到的是较细的双边缘,所以在图像的边缘增强方面二阶微分算子的效果较好。
本文转自:博客园 - Brook@CV,转载此文目的在于传递更多信息,版权归原作者所有。
原文链接:https://www.cnblogs.com/wangguchangqing/p/6947727.html